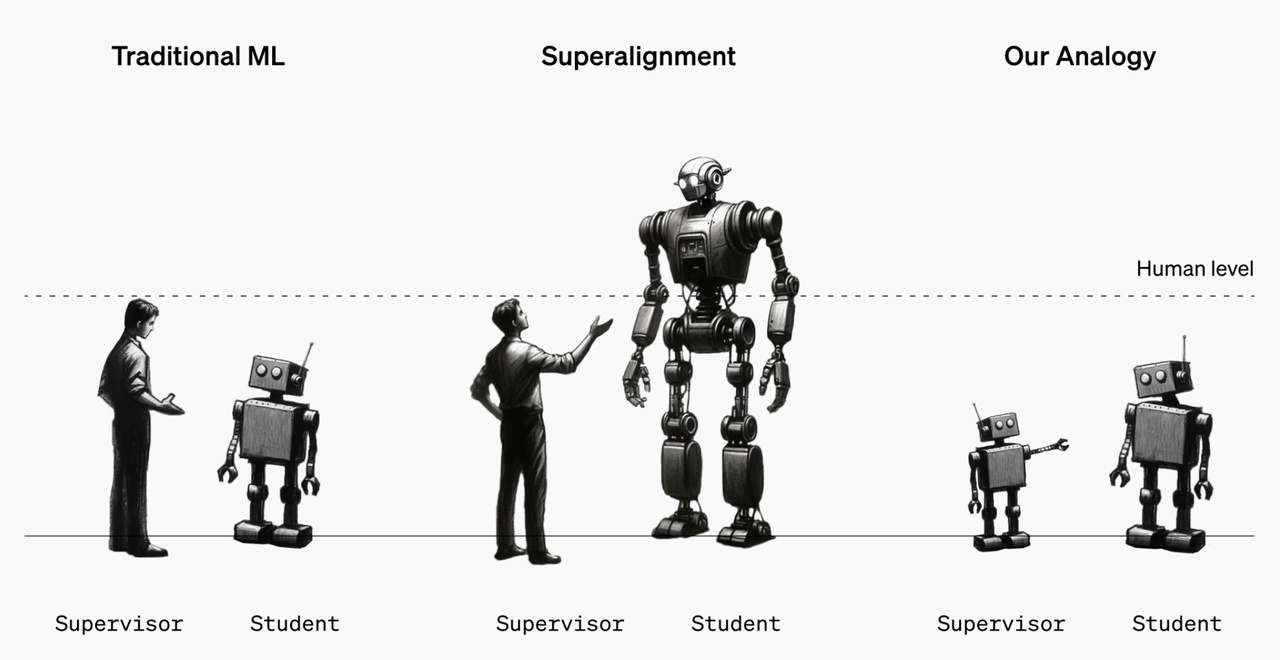
Alignment in LLM
对齐什么?
- 人类的沟通习惯
- 不答非所问;不说太多废话;没有逻辑错误
- GPT-3 -> InstructGPT
- 人类的价值观
- 不产生错误的、不安全的、有偏见的回答
- 其他人类的期望💡
- 比如:
- 更擅长精准地使用工具(API)
- 更擅长理解用户观看兴趣
- 更擅长挖掘视频卖点
- 更擅长将一个用户query转写成便于系统理解query
- 比如:
对齐的成本?
InstructGPT 提到了Alignment Tax,LLM在对齐后,会在传统的NLP任务上掉点。
怎么对齐?
SFT
收集我们认为对齐了的语料,对语言模型进行SFT。
最简单的方式,但效率相对比较低,特别是对于一些抽象的任务,如简洁性、安全性。
RLHF (Preference Optimization)
来自InstructGPT的典型架构: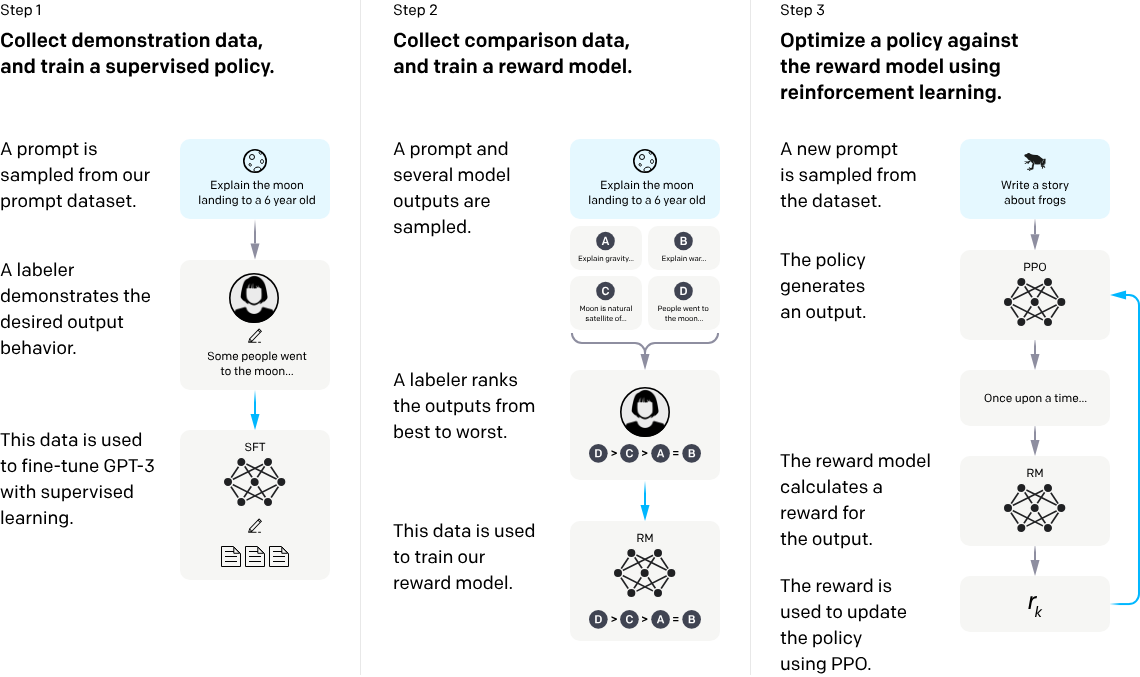
Why RLHF?
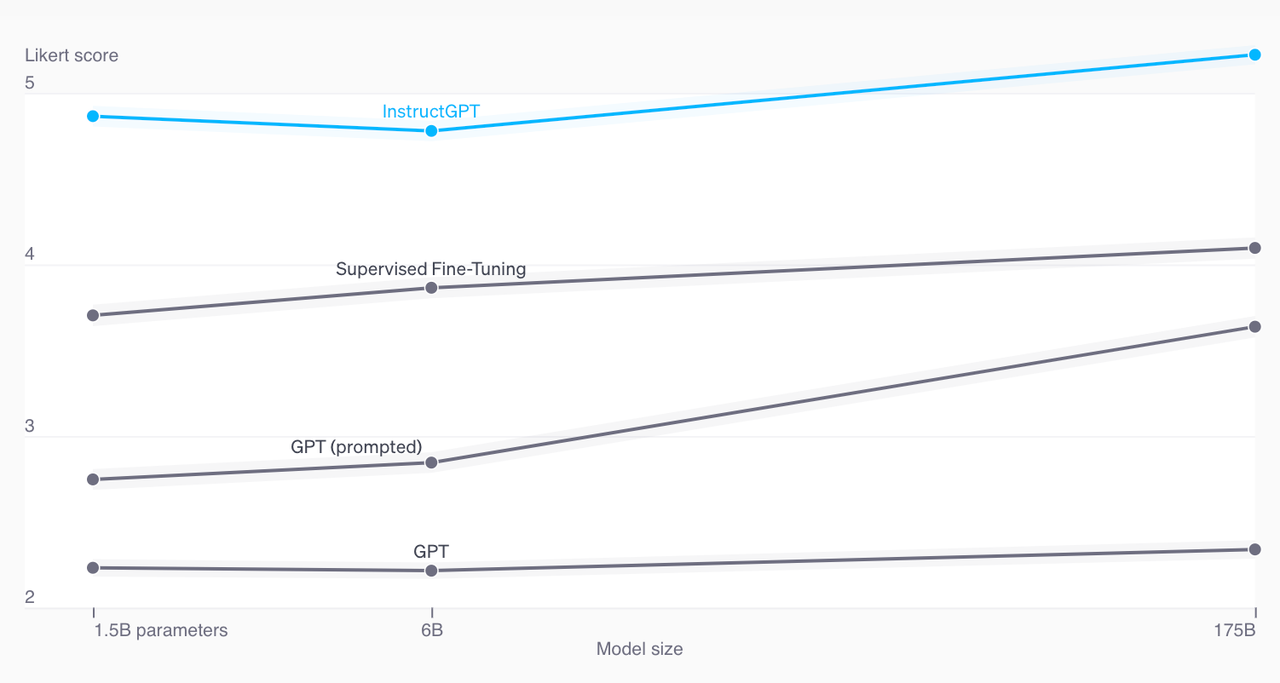
纵轴是人类偏好的得分。RLHF相比于SFT还有较大的提升空间。
Algorithms
PPO (Proximal Policy Optimization)
如果想全面理解PPO,需要的背景知识:
- 强化学习基础概念:
- Agent:智能体;Environment:环境;action:动作;state:状态;reward:单步奖励
- 多步回报return(随机变量):$u_t = \sum_t \gamma^{t-1}r_t$;
- 回报在某个(s,a)下的期望 -> 动作价值函数:$Q_{\pi}(s,a)$
- 动作价值函数关于动作的期望 -> 状态价值函数:$V_{\pi}(s)$
- Policy Gradient:强化学习的一类主要分支,直接学习一个策略网络$\pi_(a|s;\theta)$使目标$J(\theta)=E_s[V(s;\theta)]=E_s[\sum_a\pi(a|s;\theta)\cdot Q_{\pi}(s,a)]$,也就是策略价值函数的期望最大。
- Actor-Critic:Policy Gradient的一种实现架构:在如何建模建模$Q_{\pi}(s,a)$的问题上使用一个神经网络来拟合,即Critic。(如果用Monte Carlo的方式来近似$Q_{\pi}(s,a)$就是REINFORCE算法)
- TRPO:在基础Policy Gradient的形式定义上,增加限制$\pi_(a|s;\theta)$和$\pi_(a|s;\theta_{old})$差异的约束(KL散度),使得梯度更新稳定,不会有很大毛病。

- PPO:将TRPO里的硬约束软化,整体算法更简洁。PPO是OpenAI内部常用的强化学习算法,用于LLM属于拿来主义。
- Reward Model:通常和agent最终要达成的目标高度正相关。LLM为了适配RL框架,需要用偏好数据训练一个奖励模型。
- Bradley-Terry model:最常用的LLM奖励模型建模方式,对一条偏好数据:$(x,y_w, y_l)$,奖励模型的损失函数为:$-log(\sigma(r(x,y_w)-r(x,y_l))$。注意这里的奖励函数差的形式,下文有用。
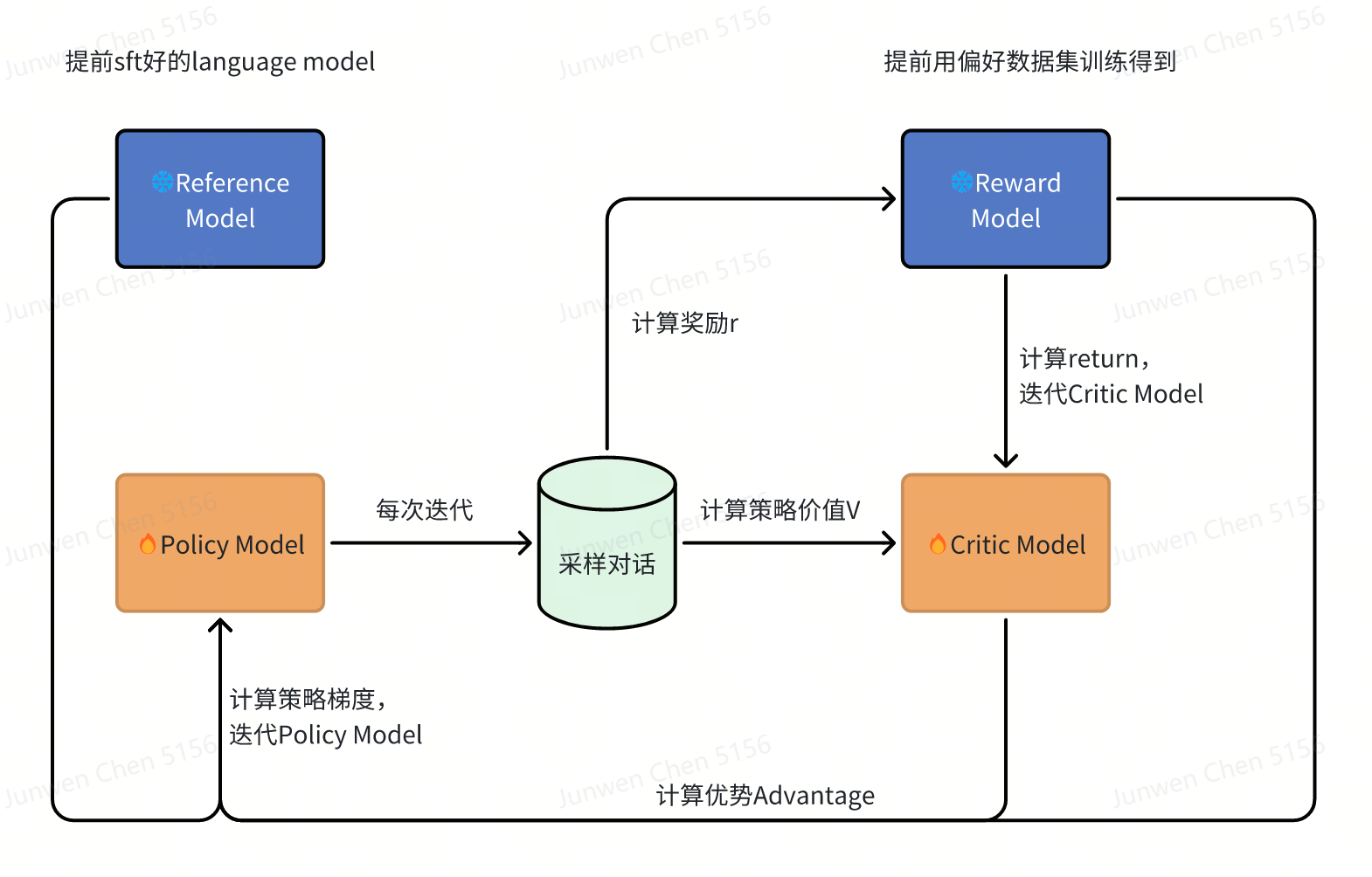
PPO各个模块:
- Reward Model是提前训练好的:$L(\psi)=log;\sigma(r(x,y_w)-r(x,y_l))$
- 实际训练的时候还会再加一个语言模型的损失函数
- 最终的奖励需要再考虑一个KL散度的惩罚:$r_{total} = r(x,y) - \eta KL(\pi_{\phi}^{RL}(y|x),\pi_{\phi}^{SFT}(y|x))$
- Reference Model就是某个已经SFT好的语言模型。
- Policy模型的训练:
- 以KL惩罚项的形式为例(还有clip形式):
- $L_{ppo-penalty}(\theta) = \hat E_t [\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t] - \beta KL(\pi_{\theta_{old}}(\cdot|s_t), \pi_{\theta}(\cdot|s_t))$
- 其中,$\hat A_t$是优势函数的近似,这里用GAE(Generalized Advantage Estimation):$\hat A_t^{GAE(\gamma, \lambda)} = \sum_{l=0}^{\infty}(\gamma\lambda)^l\delta_{t+l}$
- $\lambda$是指数滑动平均的超参,$\gamma$是折扣系数
- $\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)$就是TD error
- $L_{ppo-penalty}(\theta) = \hat E_t [\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t] - \beta KL(\pi_{\theta_{old}}(\cdot|s_t), \pi_{\theta}(\cdot|s_t))$
- 以KL惩罚项的形式为例(还有clip形式):
- Critic模型的训练:$L_{critic(\phi)} = \hat{E_t}[||V_{\phi}(s_t)-\hat R_t||^2]$
- $\hat R_t$是状态$s_t$下的实际多步回报(return): $\hat R_t = \sum_{l=0}^{\infty}\gamma^l r_{t+l}$
总结下PPO的特点:
- 具备了TRPO稳定更新的优势,相比之下更简洁了,但对于LLM来说还是很复杂。
- 做一次训练,用到了4个模型,中间某个模型没训好就会导致最终效果不好,训练的难度比较大。
- 每次训练迭代,需要先采样模型输出,整体训练速度会相对慢。
有哪些知名模型采用了?
- Instruct-GPT / GPT-3.5
- LLAMA3
DPO (Direct Preference Optimization)
相比PPO干掉了Reward Model。
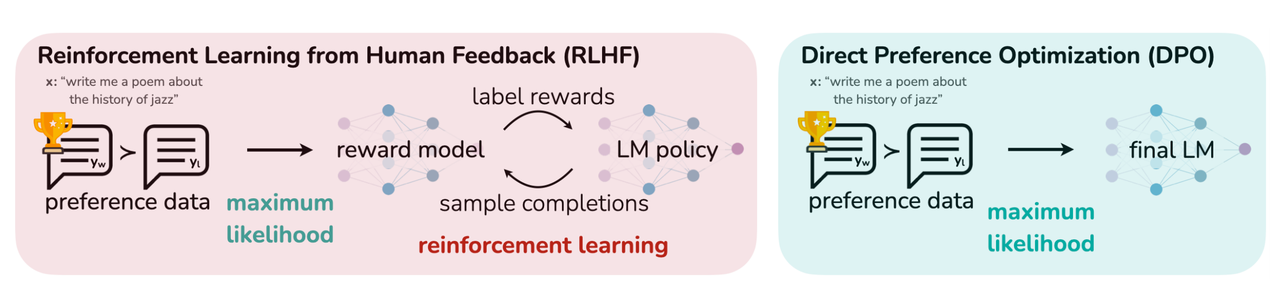
省去推导过程:$r(x,y) = \beta log\frac{\pi_r(y|x)}{\pi_{ref}(y|x)}+\beta log Z(x)$,其中$Z(x) = \sum_y \pi_{ref}(y|x) exp(\frac{1}{\beta}r(x,y))$,是配分函数,跟具体的y取值无关。用一个减法形式可以消掉配分函数:$r(x,y_w) - r(x,y_l) = \beta log\frac{\pi_r(y_w|x)}{\pi_{ref}(y_w|x)} - \beta log\frac{\pi_r(y_l|x)}{\pi_{ref}(y_l|x)}$,也就是说两个回答的奖励函数的差,和这两个回答在当前模型上的似然与参考模型的似然的差的差,正相关。这里既要求当前模型在好的回答上比坏的回答似然更高,也要求当前模型比老模型的似然更高。
带入Bradley-Terry model的损失函数,得到DPO的损失函数,对一条偏好数据:$(x,y_w, y_l)$,$L_{DPO}(\pi_{\theta},\pi_{ref}) = -log(\sigma(\beta log\frac{\pi_{\theta}(y_w|x)}{\pi_{ref}(y_w|x)} - \beta log\frac{\pi_{\theta}(y_l|x)}{\pi_{ref}(y_l|x)}))$
这里的所谓重参数的地方是:原来是先训练好一个$r_(\phi)$函数,然后用$r_(\phi)$的ground truth $r^*$来优化$\pi_(\theta)$。现在重新把目标用$r_(\phi)$来表示,$r_(\phi)$又可以消掉,目标最终$\pi_(\theta)$表示,整个过程中就可以省去奖励模型,直接学习参数$\theta$。
DPO损失函数的梯度拆解:
其中$\hat r_{\theta}(x,y) = \beta log\frac{\pi_{\theta}(y|x)}{\pi_{ref}(y|x)}$
也就是说DPO,会增加$y_w$的似然,减少$y_l$的似然,且奖励预估偏差越大,整体权重也会越大。
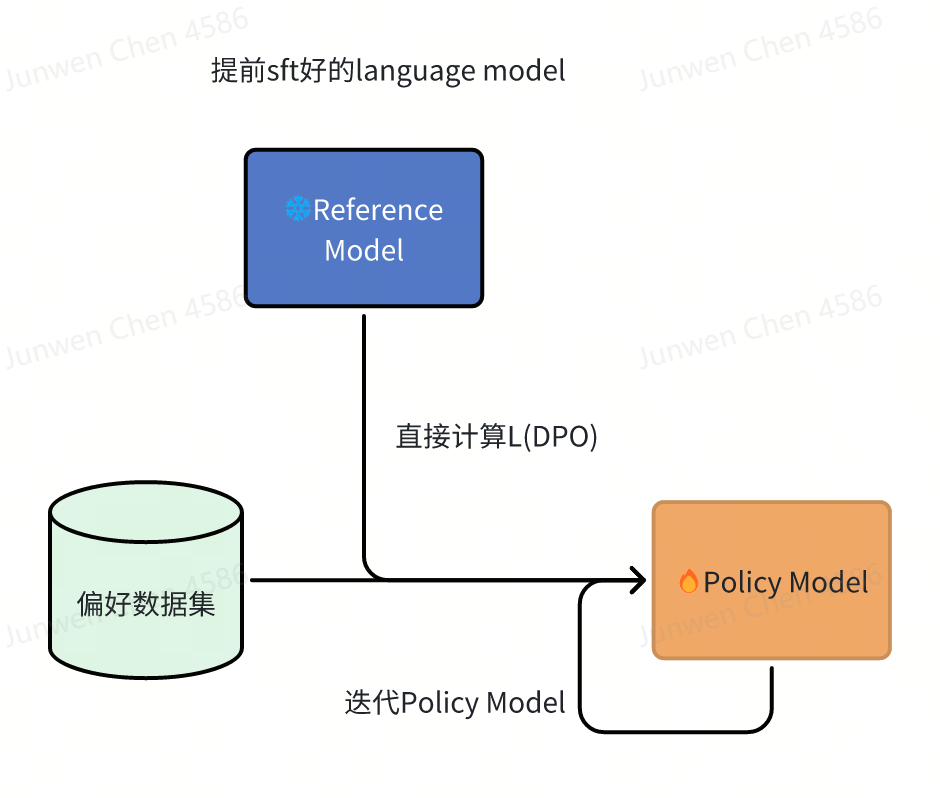
这里还有个细节:偏好数据集理论上都应该是Reference Model采样出来的。所以实践中,要么自己采样一些不同的输出,去标注;如果要用现成的偏好数据集(学术圈很常用),需要把要用的Reference Model在偏好数据集上sft下。
总结下DPO的特点:
- 去掉了reward model,整体架构更简洁了。
- 实战中发现比PPO更容易过拟合。
- 还存在SimPO提出的奖励函数和inference时目标不完全对齐的问题。
有哪些知名模型采用了?
- LLAMA3
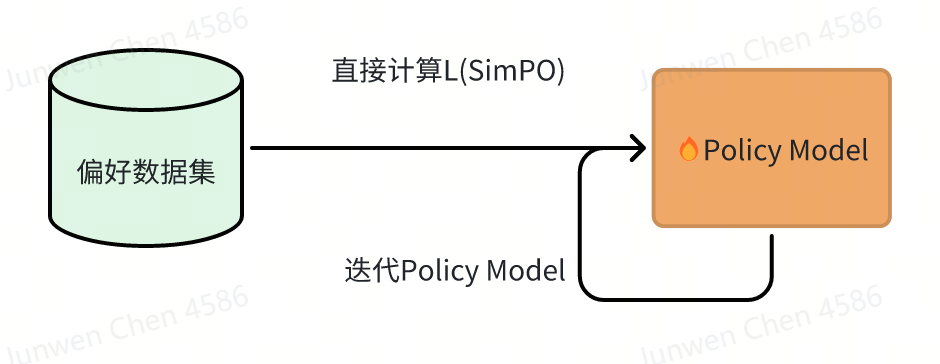
SimPO
相比于DPO,又更近一步干掉了Reference Model。
直接用平均似然作为奖励函数。
$$r_{SimPO}(x,y) = \frac{\beta}{|y|} \sum_{i=1}^y log{\pi_{\theta}(y_i|x,y_{<i})}$$
SimPO的损失函数:对一条偏好数据:$(x,y_w, y_l)$,
$$L_{SimPO}(\pi_{\theta}) = -log(\sigma(\frac{\beta}{|y_w|} \sum_{i=1}^{y_w} log{\pi_{\theta}(y_i|x,y_{<i})} - \frac{\beta}{|y_l|} \sum_{i=1}^{y_l} log{\pi_{\theta}(y_i|x,y_{<i})} - \gamma))$$
SimPO相比DPO的优势:
- 少了Reference Model,整体架构更简洁了
- reward相对于DPO和最终infer时的目标更一致。DPO在一些情况下,reward大但似然小。
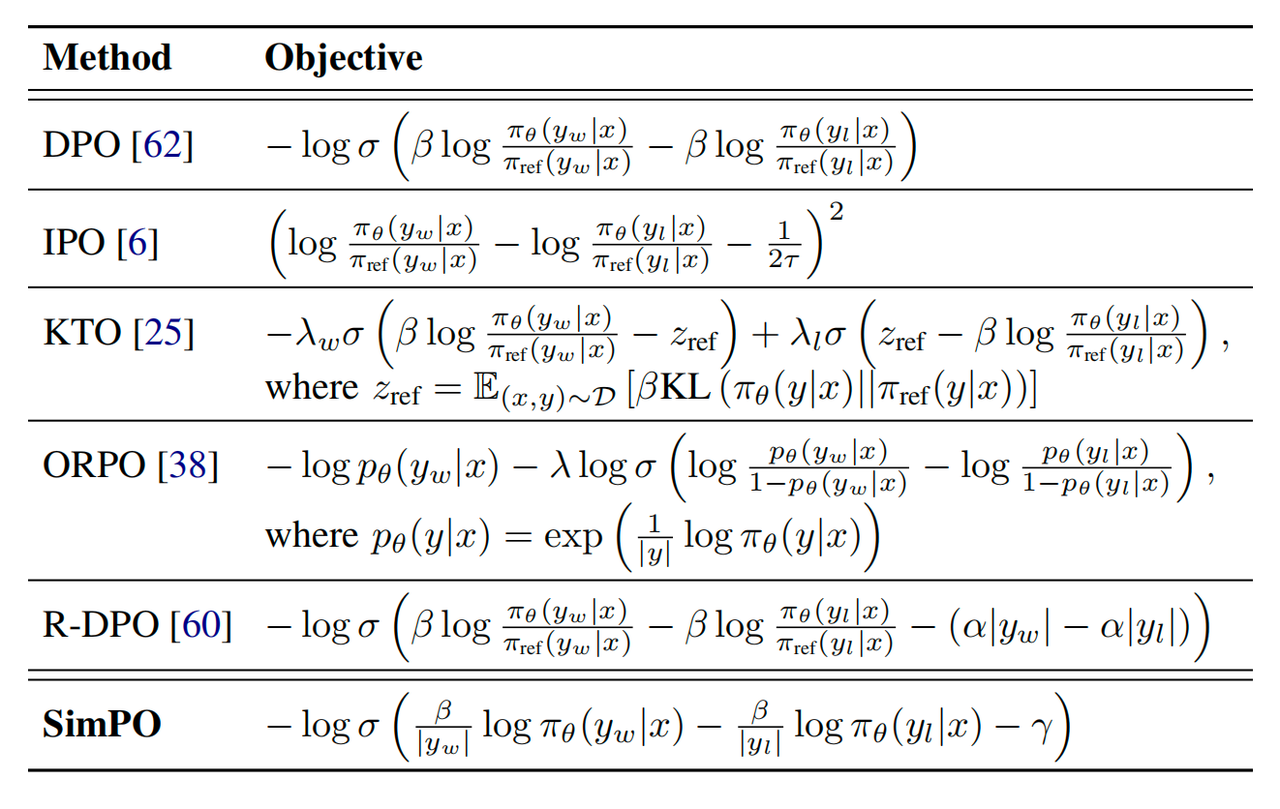
常见的Preference Optimization的目标函数:
关于应用的思考
- 在llm生成推荐的场景中,我们可以通过生产结果的实际后验统计效果,来构建一个推荐偏好数据集,对llm进行训练。比如点赞多的推荐为正例,点踩多的为负例。这样可以免除人工标注。
- 现在的偏好,似乎还是在学人类整体(群体)的偏好。有没有可能探索一下个人的偏好?比如每个人的偏好就用一个uid的token表示,我们在训练中,将llm 参数fix,只tune这个token的embedding?
Reference
- https://openai.com/superalignment/
- https://openai.com/index/our-approach-to-alignment-research/
- https://openai.com/index/instruction-following/
- Proximal Policy Optimization Algorithms
- Training language models to follow instructions with human feedback
- Secrets of RLHF in Large Language Models. Part I: PPO
- Secrets of RLHF in Large Language Models. Part II: Reward Modeling
- Direct Preference Optimization: Your Language Model is Secretly a Reward Model
- SimPO: Simple Preference Optimization with a Reference-Free Reward