PPO in LLM详解
策略梯度的通用形式
$\nabla_\theta J(\theta)=E_{\tau \sim \pi_\theta}[\sum_{t=0}^T\nabla_\theta log \pi_\theta(a_t|s_t)\Phi_t]$
- 其中,$\Phi_t$可以是各种形式:
- 如 $\Phi_t = R(\tau)$
- 或者 $\Phi_t = \sum_{t’=t}^T R(s’_t, a_t’)$
- 或者 $\Phi_t = \sum_{t’=t}^T R(s’_t, a_t’) - b(s_t)$
- 也可以是 $\Phi_t = A(s_t,a_t)=Q(s_t,a_t)-V(s_t)$
用优势函数可以降低 $\Phi_t$ 的方差。
策略梯度的 $\Phi_t$ 如果用蒙特卡洛的方式来估算,就是REINFORCE算法;如果用一个critic model来学,就是Actor-Critic架构。PPO本质上采用了Actor-Critic架构。
RLHF到底为LLM贡献了啥?
对齐!对齐人类的沟通方式,对齐人类的价值体系,比如安全性、真实性等等。
PPO的由来
随机梯度策略 —为了限制梯度更新过大—> TRPO —将约束直接加载目标函数里(大幅简化)—> PPO
总而言之,TRPO和PPO的核心思想都是采用更小更稳定的策略更新,只不过PPO实现更简单。

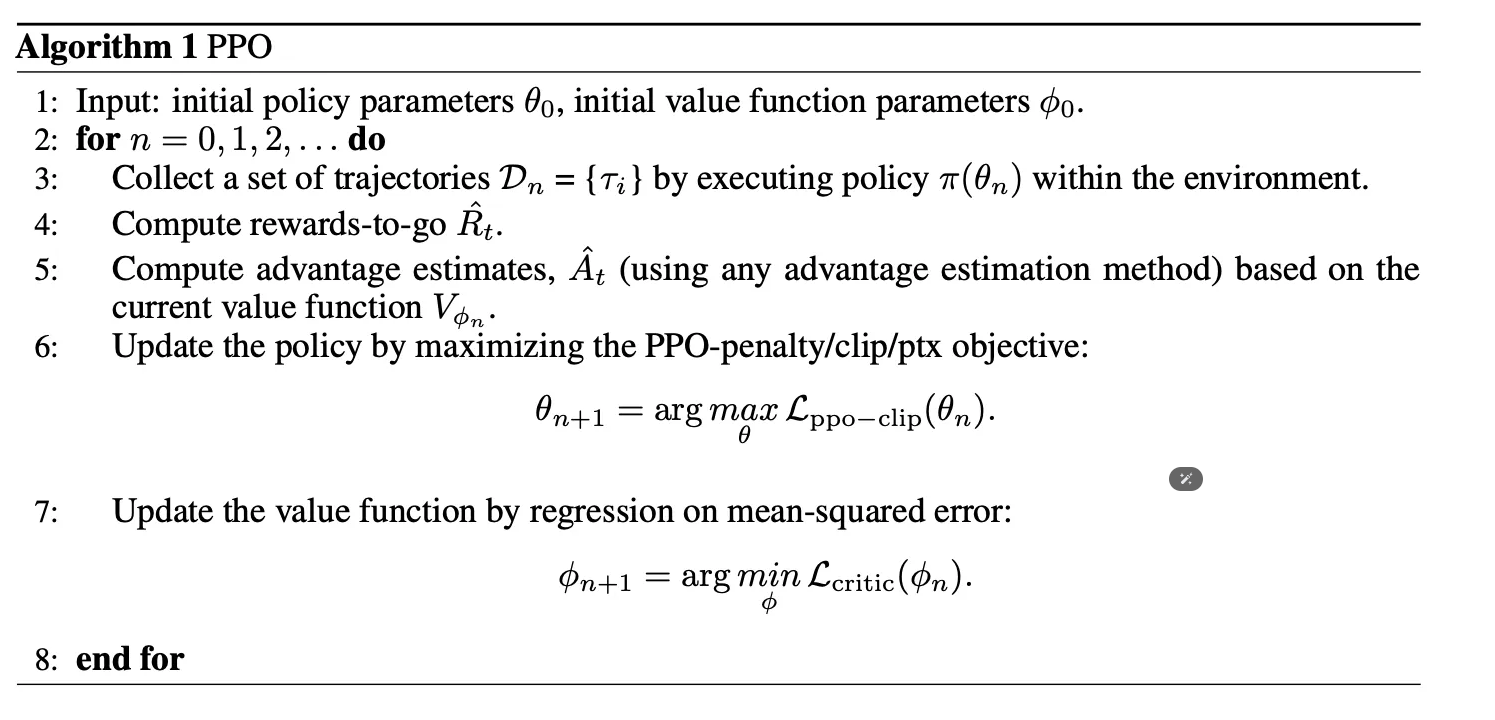
PPO算法
其中:
- Policy模型的训练:
- CLIP形式:$L_{ppo-clip}(\theta) = \hat E_t[min(\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t, clip(\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}, 1-\epsilon, 1+\epsilon)\hat A_t)]$
- $\hat A_t$ 是优势函数的近似,这里用GAE(Generalized Advantage Estimation):
- $\hat A_t^{GAE(\gamma, \lambda)} = \sum_{l=0}^{\infty}(\gamma\lambda)^l\delta_{t+l}$
- $\lambda$ 是指数滑动平均的超参,$\gamma$ 是折扣系数
- $\delta_t = r_t + \gamma V(s_{t+1}) - V(s_t)$
- 为什么用GAE估计优势函数?
- https://zhuanlan.zhihu.com/p/345687962
- 泛化优化估计(GAE)实际上是 $\lambda$ -return应用在估计优势函数的版本。
- $\hat A_t$ 是优势函数的近似,这里用GAE(Generalized Advantage Estimation):
- 惩罚项形式:$L_{ppo-penalty}(\theta) = \hat E_t [\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t] - \beta KL(\pi_{\theta_{old}}(\cdot|s_t), \pi_{\theta}(\cdot|s_t))$
- CLIP形式:$L_{ppo-clip}(\theta) = \hat E_t[min(\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}\hat A_t, clip(\frac{\pi_{\theta}(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}, 1-\epsilon, 1+\epsilon)\hat A_t)]$
- Critic模型的训练: $L_{critic(\phi)} = \hat{E_t}[||V_{\phi}(s_t)-\hat R_t||^2]$
- $\hat R_t$ 是状态$s_t$下的实际收益:$\hat R_t = \sum_{l=0}^{\infty}\gamma^l r_{t+l}$
- Reward模型是提前训练好的:$L(\psi)=log;\sigma(r(x,y_w)-r(x,y_l))$
- 实际训练的时候还会再加一个语言模型的损失函数
- 最终的奖励需要再考虑一个KL散度的惩罚:$r_{total} = r(x,y) - \eta KL(\pi_{\phi}^{RL}(y|x),\pi_{\phi}^{SFT}(y|x))$
PPO算法的优点:
- 通过clip操作,避免了过大的policy更新
min + clip的最终效果:(横坐标是ratio,纵坐标是目标值)
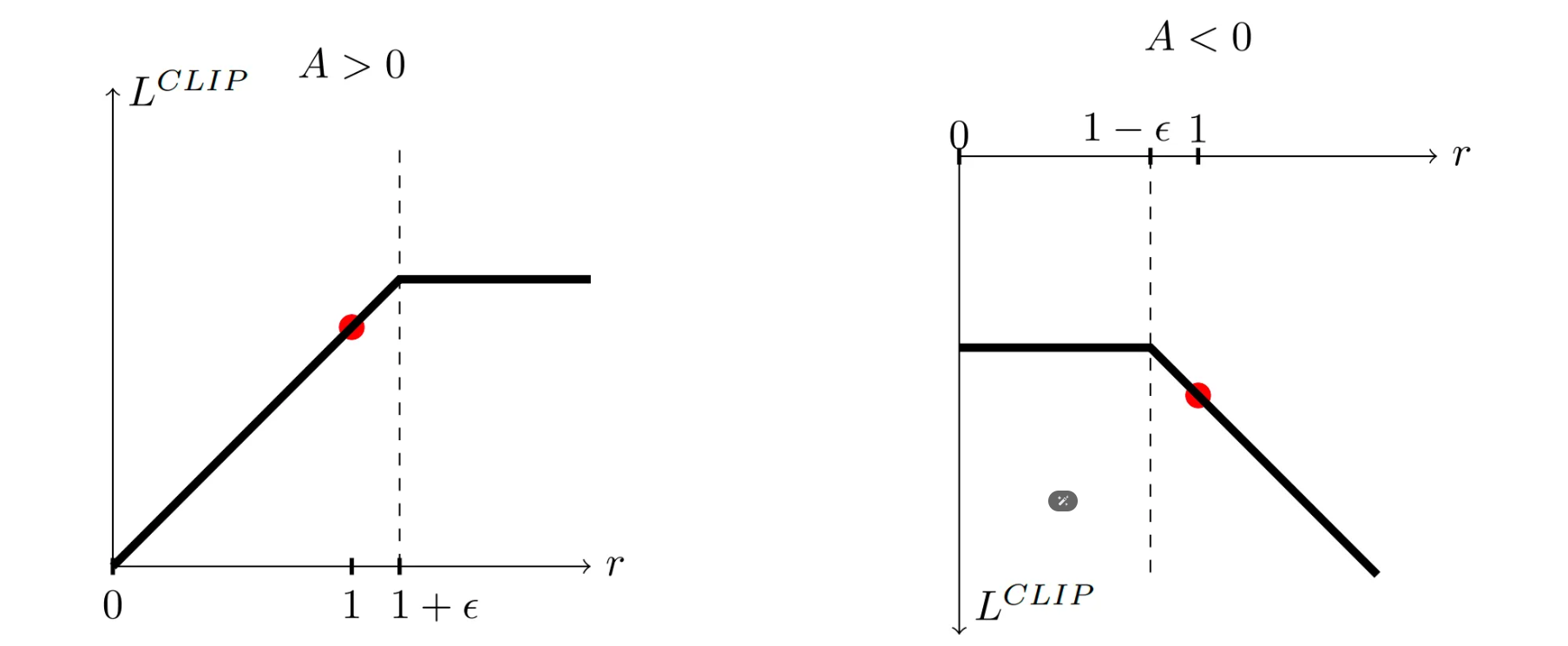
当A>0,说明当前动作表现优于平均水平。如果此时ratio较大,说明新策略相对老策略在这个动作的概率已经比较大,我们不要过于贪心,这里就将梯度设成0,不再更新。
当A<0,说明当前动作表现差于平均水平。如果此时ratio较小,说明新策略相对老策略在这个动作的概率已经比较小,我们不要过于贪心,这里就将梯度设成0,不再更新。
- 比TRPO更简洁,但具有了TRPO的优点:稳定。
PPO代码实现
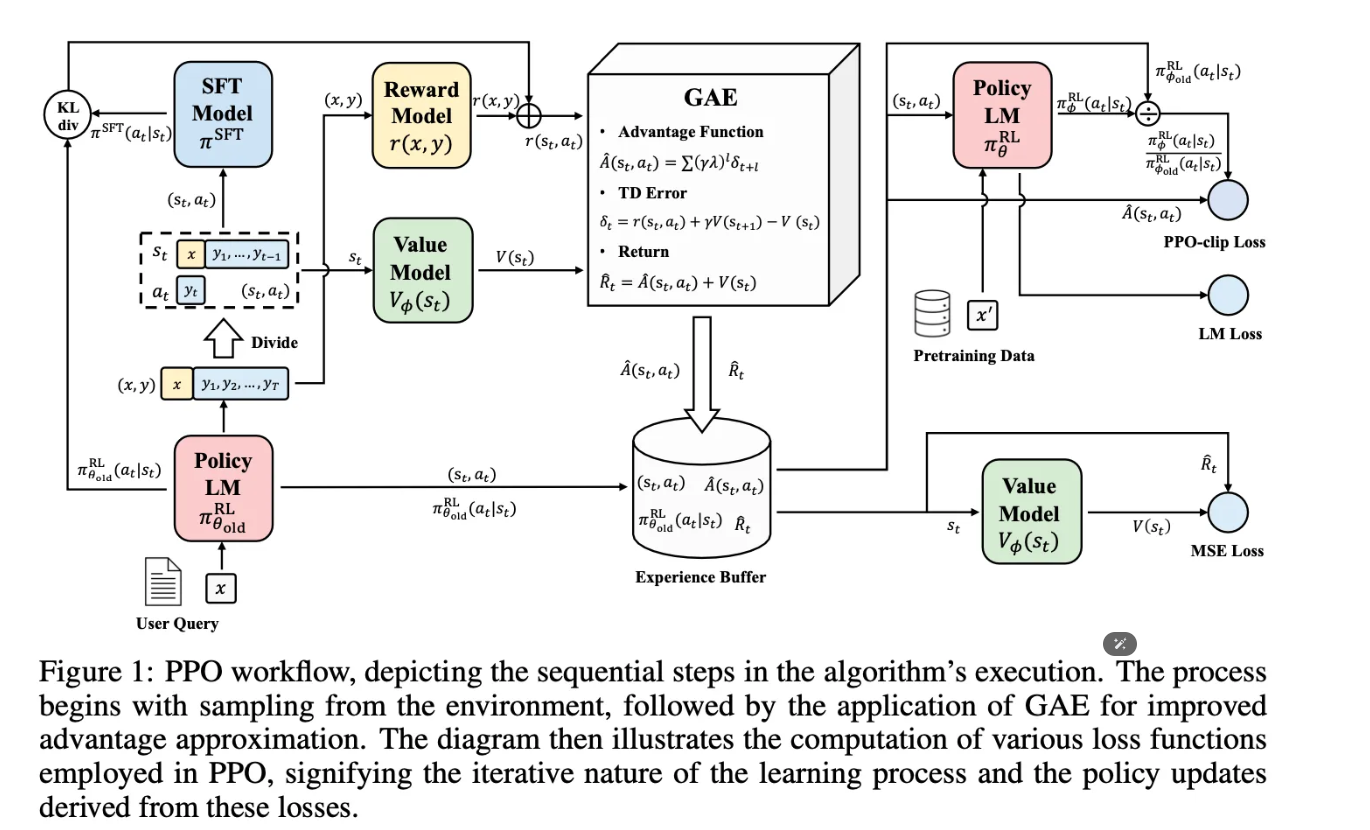
从图上(结合代码)看,一共涉及4个模型:
- policy model (RLHF最终获取的语言模型)
- critic model (图中Value Model,计算value,参数可训)
- reference model (图中SFT Model,用于计算KL,参数固定)
- reward model (计算reward,参数固定)
Loss一共有3个:
- PPO-clip Loss (作用于policy model)
- LM Loss (作用于policy model,通常是可选项)
- MSE Loss (作用于critic model)
代码流程:
make experiences
- 随机采样prompt
- 生成对应的response
- 根据response计算reward(reward model)和value(critic model)
- 计算policy model的probs和ref model的probs的kl散度
根据experience生成新的训练数据
计算advantages和returns
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17def get_advantages_and_returns(self, rewards: List[float], values: List[float]):
'''
Copied from TRLX: https://github.com/CarperAI/trlx/blob/main/trlx/models/modeling_ppo.py
'''
response_length = len(values)
advantages_reversed = []
lastgaelam = 0
for t in reversed(range(response_length)):
nextvalues = values[t + 1] if t < response_length - 1 else 0.0
delta = rewards[t] + self.gamma * nextvalues - values[t]
lastgaelam = delta + self.gamma * self.lam * lastgaelam
advantages_reversed.append(lastgaelam)
advantages = advantages_reversed[::-1]
returns = [a + v for a, v in zip(advantages, values)]
assert len(returns) == len(advantages) == len(values)
return advantages, returns
train step
- policy_model和critic_model执行前向计算
- criterion
- 计算vf_loss
vf_loss1 = (values - returns) ** 2
- 计算pg_loss1
pg_loss1 = advantages * ratio
- 计算vf_loss
- 使用优化器梯度回传
参考
- PPO原始论文:Proximal Policy Optimization Algorithms
- Secrets of RLHF in Large Language Models. Part I: PPO
- hugging face的入门科普文:The intuition behind PPO - Hugging Face Deep RL Course