机器学习中的Monte-Carlo 来说一下机器学习中Monte-Carlo中用在什么地方:
贝叶斯推论和学习:
归一化:$p(x | y) =\frac{p(y | x)p(x)}{\int_Xp(y| x’)p(x’)dx’}$
边缘概率的计算:$p(x | y) = \int_Z p(x, z | y)dz$
求期望:$E_{p(x|y)}(f(x)) = \int_Xf(x)p(x|y)dx$
上面三处都用到了积分,Monte-Carlo的核心思想即用样本的和去近似积分 。
随机采样介绍 所谓采样,实际上是指根据某种分布去生成一些数据点 ,比如“石头剪刀布”的游戏,服从均匀分布,且概率都是三分之一,采样即希望随机获得一个“石头”或者“剪刀”或者“布”,并且每中情况出现的机会应该是一样的。也就是说,这是我们根据观察数据再确定分布的过程的逆过程 。
最基本的假设是认为我们可以获得服从均匀分布 的随机数。一般的采样问题,都可以理解成:有了均匀分布(简单分布)的采样,如何去获取复杂分布的采样。
离散分布采样 对于离散的分布 ,比如$p(x)=[0.1, 0.5, 0.2, 0.2]^T$,那么我们可以从$u \sim区间段的长度和概率成正比,这样采样完全符合原来的分布。
假设上面的向量,分别对应“你”,“好”,“合”,“协”四个字分别出现的概率,那么我们随机采样几次,看看出现的结果。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 import numpy as npindex2word = ["你" ,"好" ,"合" ,"协" ] def sample_discrete (vec ): u = np.random.rand() start = 0 for i, num in enumerate (vec): if u > start: start += num else : return i-1 return i count = dict ([(w, 0 ) for w in index2word]) for i in range (1000 ): s = sample_discrete([0.1 , 0.5 , 0.2 , 0.2 ]) count[index2word[s]] += 1 for k in count: print (k," : " , count[k])
1 2 3 4 你 : 110 好 : 493 协 : 216 合 : 181
可以看到采样的频率比较符合设定的概率分布:$[0.1,0.5,0.2,0.2]$
连续分布采样 对于连续的分布 ,如果可以计算这个分布的累积分布函数(CDF) ,就可以通过计算CDF的反函数 ,结合基础的均匀分布,获得其采样。所以,在这个基础上我们又可以获得一些简单的分布的采样。
Box-Muller算法 Box-Muller算法 ,实现对高斯分布 的采样。
原理 :
假设随机变量$x,y$都服从标准高斯分布,则有:$f(x,y) =
如果使用极坐标系,即$x=rsin(\theta)$,$y=rcos(\theta)$,有$r^2 = x^2+y^2$。
求CDF:$P(r\leq R) = \int_{r=0}^R\int_{\theta=0}^{2\pi}\frac{1}{2\pi}e^{r^2}r;drd\theta=\int_{r=0}^r=e^{-r^2}r;dr$
用$s=\frac{1}{2}r^2$带入,得:$P(r\leq R) = \int _{s=0}^{r^2/2}e^{-s}ds = 1 - e^{-r^2/2}$
则,随机采样$\theta$服从均与分布,范围是$0 \leq \theta \leq 1$,可以使$\theta=2\pi U_1$。
$1-e^{-r^2/2}=1-U_2$即$r=\sqrt{-1ln(U_2)}$
算法流程 :
抽样两个服从均匀分布的随机数:$0
令$\theta = 2\pi U_1$,$r=\sqrt{-2ln(U_2)}$
$x=rsin(\theta)$,$y=rcos(\theta)$ 都是服从标准高斯分布的变量。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 from pylab import *import numpy as npdef boxmuller (n ): x = np.zeros((n,2 )) y = np.zeros((n,2 )) for i in range (n): x[i,:] = np.array([2 ,2 ]) x2 = x[i,0 ]*x[i,0 ]+x[i,1 ]*x[i,1 ] while (x2)>1 : x[i,:] = np.random.rand(2 )*2 -1 x2 = x[i,0 ]*x[i,0 ]+x[i,1 ]*x[i,1 ] y[i,:] = x[i,:] * np.sqrt((-2 *log(x2))/x2) y = np.reshape(y,2 *n,1 ) return y y = boxmuller(1000 ) hist(y,normed=1 ,fc='c' ) x = arange(-4 ,4 ,0.1 ) plot(x,1 /np.sqrt(2 *np.pi)*np.exp(-0.5 *x**2 ),'g' ,lw=6 ) xlabel('x' ,fontsize=24 ) ylabel('p(x)' ,fontsize=24 ) show()
接下来,我们专注于复杂的任意分布的采样。
拒绝采样 拒绝采样(Rejection Sampling)。
假设我们已经可以抽样高斯分布q(x)(如Box–Muller_transform 算法),我们按照一定的方法拒绝 某些样本,达到接近$p(x)$分布的目的:
具体操作:
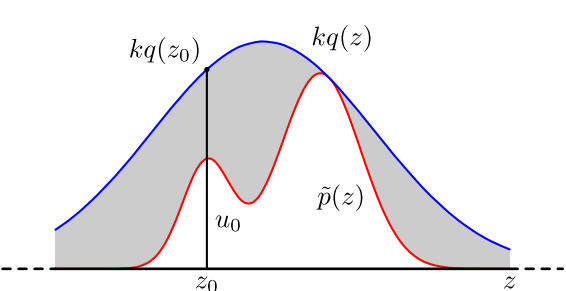
首先,确定常量$k$,使得$p(x)$总在$kq(x)$的下方。
$x$轴方向:从$q(x)$分布抽样得到$a$。但是$a$并不一定留下,会有一定的几率被拒绝 。
$y$轴方向:从均匀分布$(0,kq(a))$中抽样得到$u$。如果$u>p(a)$,也就是落到了灰色的区域中,拒绝,否则接受这次抽样。
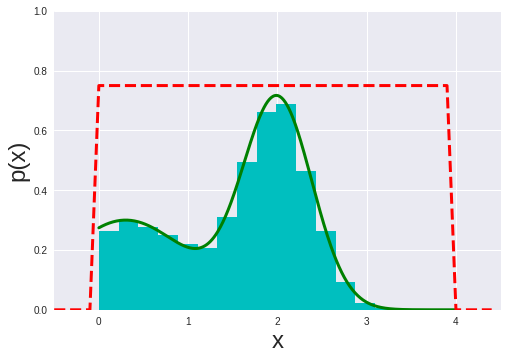
拒绝采样实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 %matplotlib inline import matplotlibimport numpy as npimport matplotlib.pyplot as pltimport seaborndef qsample (): """使用均匀分布作为q(x),返回采样""" return np.random.rand()*4. def p (x ): """目标分布""" return 0.3 *np.exp(-(x-0.3 )**2 ) + 0.7 * np.exp(-(x-2. )**2 /0.3 ) def rejection (nsamples ): M = 0.72 samples = np.zeros(nsamples,dtype=float ) count = 0 for i in range (nsamples): accept = False while not accept: x = qsample() u = np.random.rand()*M if u<p(x): accept = True samples[i] = x else : count += 1 print "reject count: " , count return samples x = np.arange(0 ,4 ,0.01 ) x2 = np.arange(-0.5 ,4.5 ,0.1 ) realdata = 0.3 *np.exp(-(x-0.3 )**2 ) + 0.7 * np.exp(-(x-2. )**2 /0.3 ) box = np.ones(len (x2))*0.75 box[:5 ] = 0 box[-5 :] = 0 plt.plot(x,realdata,'g' ,lw=3 ) plt.plot(x2,box,'r--' ,lw=3 ) import timet0=time.time() samples = rejection(10000 ) t1=time.time() print "Time " ,t1-t0plt.hist(samples,15 ,normed=1 ,fc='c' ) plt.xlabel('x' ,fontsize=24 ) plt.ylabel('p(x)' ,fontsize=24 ) plt.axis([-0.5 ,4.5 ,0 ,1 ]) plt.show()
在高维的情况下,Rejection Sampling有两个问题:
合适的q分布很难找
很难确定一个合理的k值
导致拒绝率很高。
重要性采样 重要性采样(Importance Sampling)。
$$E(f)= \int p(x)f(x) dx$$
$$ = \int q(x)\frac{p(x)f(x)}{q(x)} dx$$
其中可以把$w(x)=\frac{p(x)}{q(x)}$称为重要性权重(importance weight)
重要性采样算法 :
从简单分布$q(x)$中采样N个样本$x^{(i)}$
计算归一化的重要性权重:$w^{(i)} =\frac{p(x^{(i)})/q(x^{(i)})}{\sum_j p(x^{(j)})/q(x^{(j)})}$
再在分布${x^{(i)}}$中,按照权重$w^{(i)}$作为概率做采样。
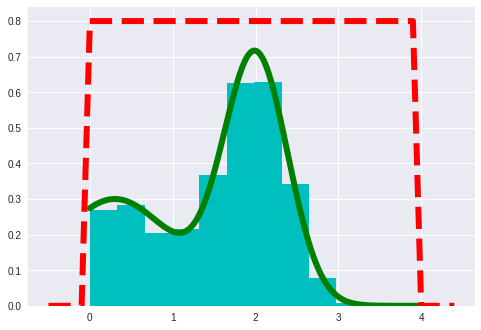
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 def qsample (): return np.random.rand()*4. def p (x ): return 0.3 *np.exp(-(x-0.3 )**2 ) + 0.7 * np.exp(-(x-2. )**2 /0.3 ) def q (x ): return 4.0 def importance (nsamples ): samples = np.zeros(nsamples,dtype=float ) w = np.zeros(nsamples,dtype=float ) for i in range (nsamples): samples[i] = qsample() w[i] = p(samples[i])/q(samples[i]) return samples, w def sample_discrete (vec ): u = np.random.rand() start = 0 for i, num in enumerate (vec): if u > start: start += num else : return i-1 return i def importance_sampling (nsamples ): samples, w = importance(nsamples) final_samples = np.zeros(nsamples,dtype=float ) w = w / w.sum () for j in range (nsamples): final_samples[j] = samples[sample_discrete(w)] return final_samples x = np.arange(0 ,4 ,0.01 ) x2 = np.arange(-0.5 ,4.5 ,0.1 ) realdata = 0.3 *np.exp(-(x-0.3 )**2 ) + 0.7 * np.exp(-(x-2. )**2 /0.3 ) box = np.ones(len (x2))*0.8 box[:5 ] = 0 box[-5 :] = 0 plt.plot(x,realdata,'g' ,lw=6 ) plt.plot(x2,box,'r--' ,lw=6 ) final_samples = importance_sampling(5000 ) plt.hist(final_samples,normed=1 ,fc='c' ) plt.show()
可以明显感觉到重要性采样,速度比较慢。
MCMC MCMC(Markov Chain Monte Carlo),上面提到的方法都是可以并行的,即某一个样本的产生不依赖于上一个样本的抽样;MCMC是一个链式的抽样过程,即每一个样本抽样跟且只跟上一个样本的抽样相关。
因此我们引入概率转移矩阵 $T$,即某一时刻是状态$s$,那么下一时刻状态是$s’$的概率是:$T(s,s’)$,于是问题变转换成了某一时刻有一个抽样,那么下一个时刻抽样的概率由$T$决定。
另外,不要忘了,不管是从什么状态开始抽样,我们都期望在第$i$次的分布概率$p(x^{(i)})$可以收敛到实际分布$p(x)$。
不可化简(irreducibility):即对于x任何可能的取值,都有机会(概率大于0)到达其他的取值(不一定要下一期,只要是在有限的时刻内),即上面的图是闭环的。
非周期的(aperiodicity)
细致平稳条件(detail balance)$p(x)T(x,x’)=p(x’)T(x’,x)$,保证了chain是reversible。
关键 :构造转移矩阵$T$,使得平稳分布恰好是我们需要的分布$p(x)$。
Metropolis-Hastings Algorithm Metropolis-Hastings的核心思想类似于拒绝采样:我们有一个采样$x^*$,要决定是否留下它。类似的,我们也有一个建议分布$q(x_i|x_{i-1})$。和拒绝采样不同 的是,一旦拒绝新的采样,将采样当前的采样作为新采样 。这也是这个算法之所以高效的原因。
算法介绍:对于目标分布$p(x)$,首先给定参考条件概率分布$q(x^*|x)$,然后基于当前x的抽样一个新样本$x^*$,然后依据一定的概率移动到$x^*$(否则还留在$x$),这个概率是接受概率$A(x_i,x^*)=min{1,\frac{p(x^*)q(x_i|x^*)}{p(x_i)q(x^*|x_i)}}$
接受概率的推导 :上面的细致平稳条件:$p(x)T(x,x’)=p(x’)T(x’,x)$,我们希望根据一个建议分布$q$和一个接受率$a$来等价于$T$。即:$p(i)q(i,j)a(i, j) = p(j)q(j,i)a(j,i)$。令$a(j,i)=1$,有$a(i,j)=\frac{p(j)q(j,i)}{p(i)q(j,i)}$。注:这段推导的符号标记和全文的风格不太相同,也比较简洁。
算法流程 :
给顶一个初始值$x_0$
重复以下步骤:
从$q(x_i|x_{i-1})$中采样一个样本$x^*$。
从均匀分布中抽样一个$u$。
如果$u<A(x_i,x^*)$
否则:
接受概率$A(x_i,x^*)$有个形象的比喻:假设你目前在一片高低不平的山地上,你此行的目的是在海拔越高的地方停留越久 ($p(x)$大的时候,样本里$x$就多)。你的方法是随便指一个新的地方,如果这个地方的海拔更高,那么就移动过去;但如果这个地方的海拔比当前低,你就抛一个不均匀的硬币决定是否过去,而硬币的不均匀程度相当于新海拔和当前海拔的比例。也即新海拔若是当前海拔的一半,你就只有1/2的概率会过去。MH算法中$q(x^*|x_i)$就是按照一定的规律指出一个新方向,$A(x_i,x^*)$就是计算相对高度。
基于上述想法的MH算法实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 import scipy.statsmu = 3 sigma = 10 def qsample (): return np.random.normal(mu,sigma) def q (x ): return exp(-(x-mu)**2 /(sigma**2 )) def p (x ): """目标分布""" return 0.3 *np.exp(-(x-0.3 )**2 ) + 0.7 * np.exp(-(x-2. )**2 /0.3 ) def hm (n=10000 ): sample = np.zeros(n) sample[0 ] = 0.5 for i in range (n-1 ): q_s = qsample() u = np.random.rand() if u < min (1 , (p(q_s)*q(sample[i]))/(p(sample[i])*q(q_s))): sample[i+1 ] = q_s else : sample[i+1 ] = sample[i] return sample x = np.arange(0 ,4 ,0.1 ) realdata = p(x) N=10000 sample = hm(N) plt.plot(x,realdata,'g' ,lw=3 ) plt.plot(x,q(x),'r' ) plt.hist(sample,bins=x,normed=1 ,fc='c' ) plt.show()
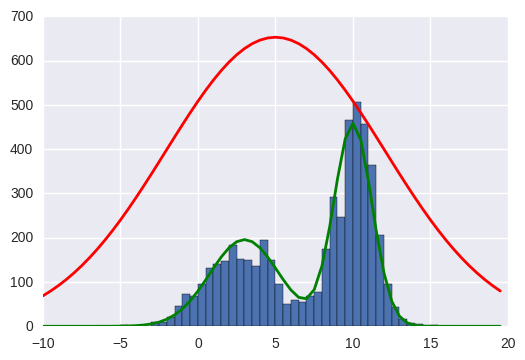
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 from pylab import *from numpy import *def p (x ): mu1 = 3 mu2 = 10 v1 = 10 v2 = 3 return 0.3 *exp(-(x-mu1)**2 /v1) + 0.7 * exp(-(x-mu2)**2 /v2) def q (x ): mu = 5 sigma = 10 return exp(-(x-mu)**2 /(sigma**2 )) stepsize = 0.5 x = arange(-10 ,20 ,stepsize) px = zeros(shape(x)) for i in range (len (x)): px[i] = p(x[i]) N = 5000 u = random.rand(N) mu = 5 sigma = 10 y = zeros(N) y[0 ] = random.normal(mu,sigma) for i in range (N-1 ): ynew = random.normal(mu,sigma) alpha = min (1 ,p(ynew)*q(y[i])/(p(y[i])*q(ynew))) if u[i] < alpha: y[i+1 ] = ynew else : y[i+1 ] = y[i] u2 = random.rand(N) sigma = 10 y2 = zeros(N) y2[0 ] = random.normal(0 ,sigma) for i in range (N-1 ): y2new = y2[i] + random.normal(0 ,sigma) alpha = min (1 ,p(y2new)/p(y2[i])) if u2[i] < alpha: y2[i+1 ] = y2new else : y2[i+1 ] = y2[i] figure(1 ) nbins = 30 hist(y, bins = x) plot(x, px*N/sum (px), color='g' , linewidth=2 ) plot(x, q(x)*N/sum (px), color='r' , linewidth=2 ) figure(2 ) nbins = 30 hist(y2, bins = x) plot(x, px*N/sum (px), color='g' , linewidth=2 ) show()
Gibbs Sampling Gibbs Sampling的本质是MH的变种。适用于我们知道完全条件概率的情况,即$p(x_j|x_1,…,x_{j-1},x_{j+1},…,x_n)$,也写作:$p(x_j|x_{-j})$。
采用设置多维概率分布$p$里的完全条件概率(full conditionals)作为 建议概率(proposal),q ,那么接受率就会始终=1,一直接受$x^*$。
对 $j=1,…,n$
注意 符号的问题,在MH算法中,$x_i$代表第i个样本的值,在Gibbs中,$x_j^{(i)}$代表第i个样本中,第j维(第j个变量)的值。
证明:
$$=min\{1,\frac{p(x^*)p(x^{(i)}_j|x^{(i)}_{-j})}{p(x^{(i)})p(x^*_j|x^*_{-j})}\}$$
$$=min\{1,\frac{p(x^*_{-j})}{p(x^{(i)}_{-j})}\}$$
$$=1$$
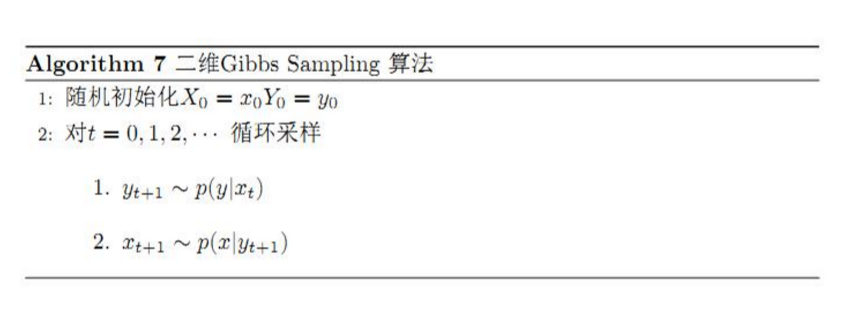
Gibbs Sampling算法
对每个变量$x_j$:
重复:
从$p(x_1 | x_{2}^{(i)}, … , x_{n}^{(i)})$中采样$x_1^{i+1}$。
从$p(x_2 | x_{1}^{(i+1)}, x_{3}^{(i)}, …, x_{n}^{(i)})$中采样$x_2^{i+1}$。
…
从$p(x_n | x_{1}^{(i+1)}, …, x_{n-1}^{(i+1)})$中采样$x_n^{i+1}$。
直到有足够多的sample。
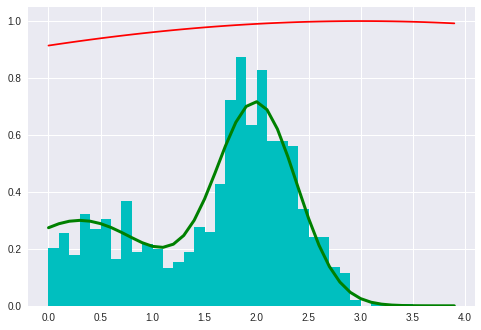
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 def pXgivenY (y,m1,m2,s1,s2 ): return np.random.normal(m1 + (y-m2)/s2,s1) def pYgivenX (x,m1,m2,s1,s2 ): return np.random.normal(m2 + (x-m1)/s1,s2) def gibbs (N=5000 ): k=20 x0 = np.zeros(N,dtype=float ) m1 = 10 m2 = 20 s1 = 2 s2 = 3 for i in range (N): y = np.random.rand(1 ) for j in range (k): x = pXgivenY(y,m1,m2,s1,s2) y = pYgivenX(x,m1,m2,s1,s2) x0[i] = x return x0 def f (x ): """目标分布""" return np.exp(-(x-10 )**2 /10 ) N=10000 s=gibbs(N) x1 = np.arange(0 ,17 ,1 ) plt.hist(s,bins=x1,fc='c' ) x1 = np.ar ange(0 ,17 , 0.1 ) px1 = np.zeros(len (x1)) for i in range (len (x1)): px1[i] = f(x1[i]) plt.plot(x1, px1*N*10 /sum (px1), color='r' ,linewidth=3 ) plt.show()
以上算法是简单的二维Gibbs Sampling的实现,如下图:https://raw.githubusercontent.com/applenob/machine_learning_basic/master/res/gibbs2.png
参考资料:




{kind=link}