强化学习导论学习笔记——(六)
6. Temporal-Difference Learning
时序差分(Temporal-Difference)简介
- 时序差分是强化学习的核心观点。
- 时序差分是DP和MC方法的结合。
- MC要等一个完整的序列结束,比如玩21点扑克,直到玩完才能知道是胜是负;相反,时序差分每经历一步,都会更新价值函数,因为每一步都会观察到一个新的Reward,比如Grid World,每走一步都知道reward是什么。
- TD往往比MC高效;TD和MC都使用经验(experience)来解决预测问题。
- 所谓差分就是下一个时刻的估计和当前时刻的估计的差。
什么是stationary?
- stationary:环境不随时间变化而变化;
- non-stationary:环境会随时间变化而变化。
TD(0)
$$V(S_t)\leftarrow V(S_t)+\alpha[R_{t+1}+\gamma V(S_{t+1})-V(S_t)]$$
因为直接使用现有的估计取更新估计,因此这种方法被称为自举(bootstrap)。
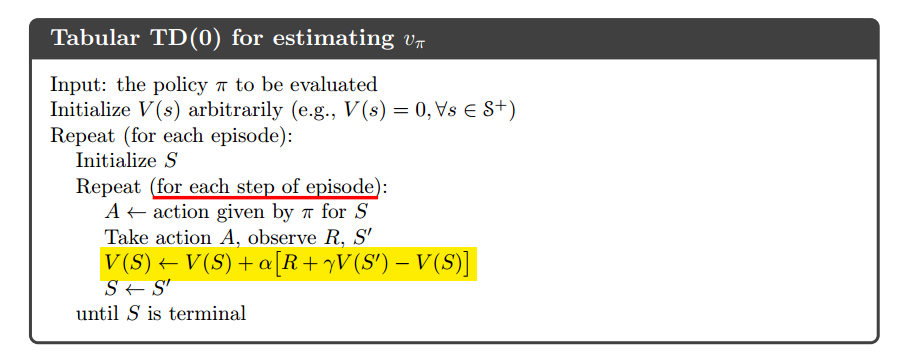
TD error:$\delta_t = R_{t+1}+\gamma V(S_{t+1})-V(S_t)$
1 | def temporal_difference(values, alpha=0.1, batch=False): |
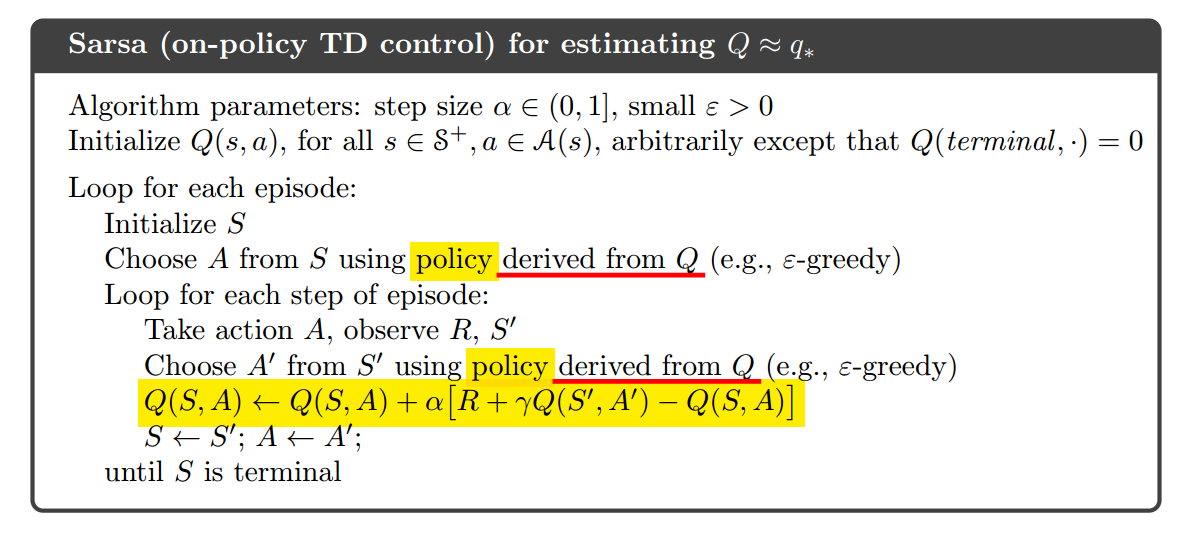
Sarsa
一种on-policy的TD控制。
$$Q(S_t,A_t)\leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma Q(S_{t+1},A_{t+1})-Q(S_t,A_t)]$$
核心代码:
1 | # Sarsa update |
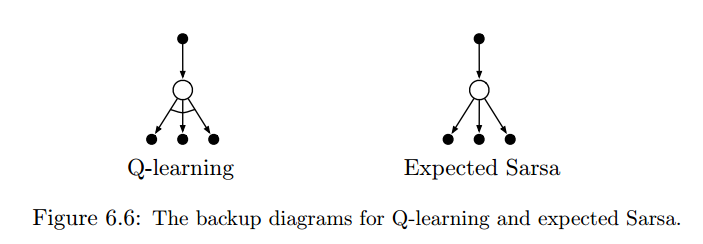
Q-learning
一种off-policy的TD控制。
早期强化学习的一个突破。
$$Q(S_t,A_t)\leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma \underset{a}{max}Q(S_{t+1},a)-Q(S_t,A_t)]$$

核心代码:
1 | def q_learning(q_value, step_size=ALPHA): |
Expected Sarsa
- 一种off-policy的TD控制。
- $Q(S_t,A_t)\leftarrow Q(S_t,A_t) + \alpha[R_{t+1} + \gamma\sum_a\pi(a|S_{t+1})Q(S_{t+1}, a)-Q(S_t,A_t)]$
Double Learning
- 解决Q-learning的最大化偏差(maximization bias)问题
- 2011年提出。
