强化学习导论学习笔记——(七)
7. n-step Bootstrapping
n-step Bootstrapping简介
- 是MC方法和一步TD方法的结合。
- 是资格痕迹(eligibility traces,具体见第12章)的基础先验知识。
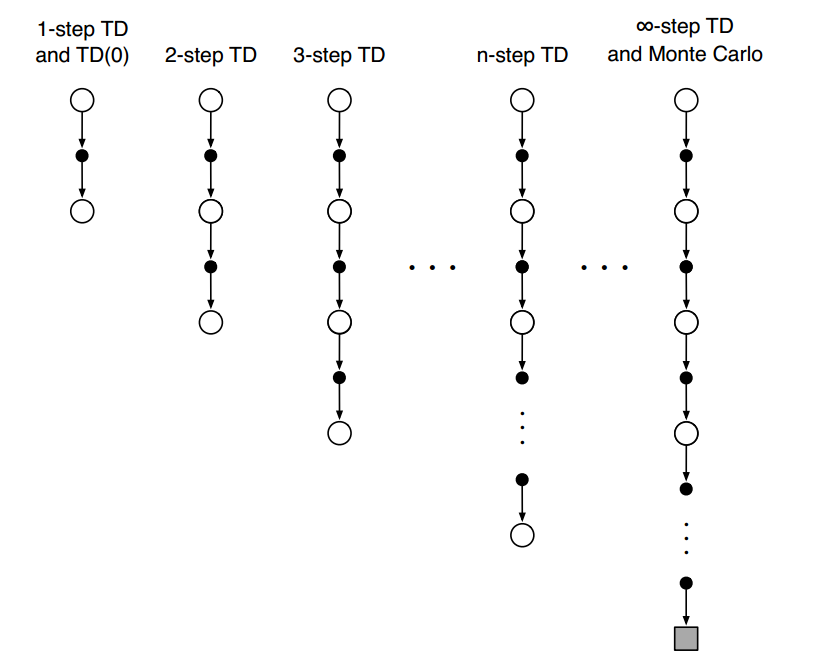
n-step TD Prediction
- MC对应的回报:$G_t = R_{t+1}+\gamma R_{t+2}+…+\gamma^{T-t-1}R_T$
- 一步TD对应的回报:$G_{t:t+1} = R_{t+1} + \gamma V_t(S_{t+1})$
- n-step的回报:$G_{t:t+n} = R_{t+1} + \gamma R_{t+2}+…+\gamma^{n-1}R_{t+n}+\gamma^nV_{t+n+1}(S_{t+n})$
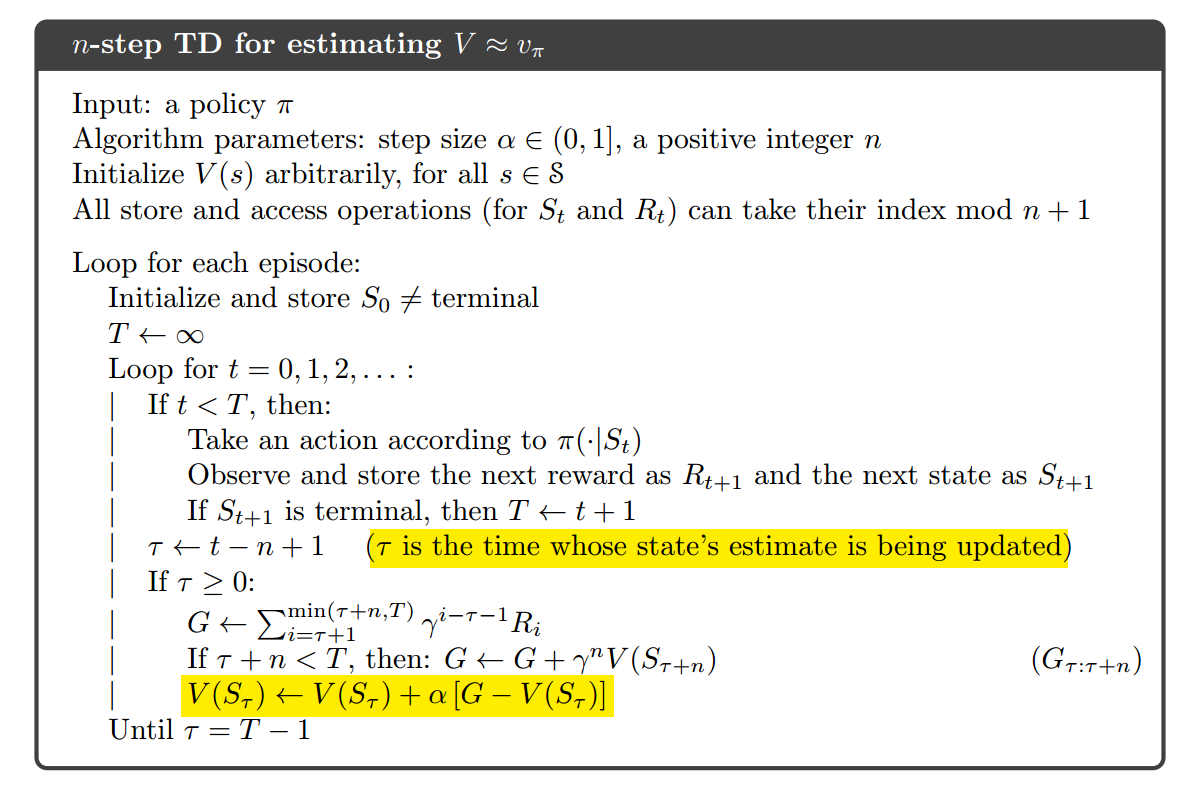
核心代码:
1 | def temporal_difference(value, n, alpha): |
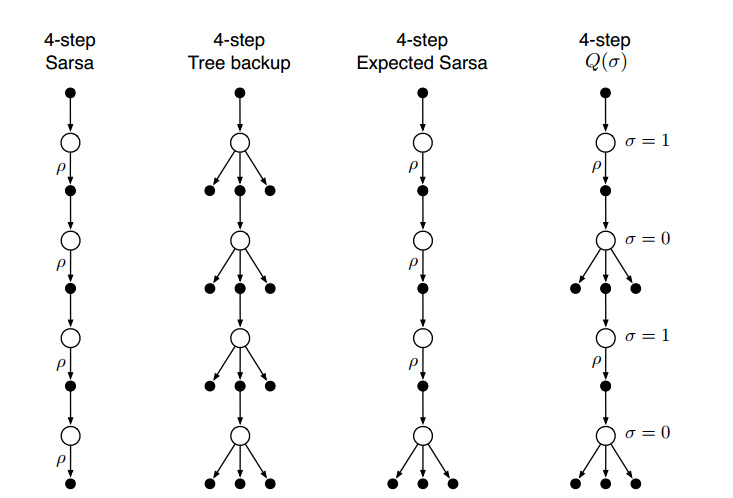
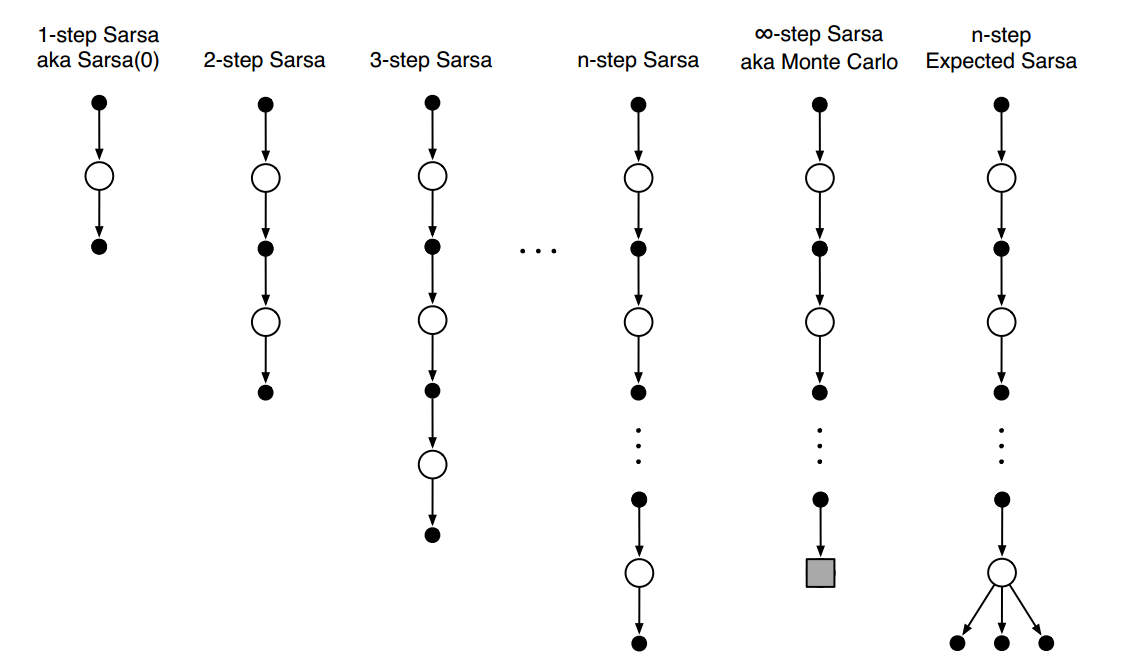
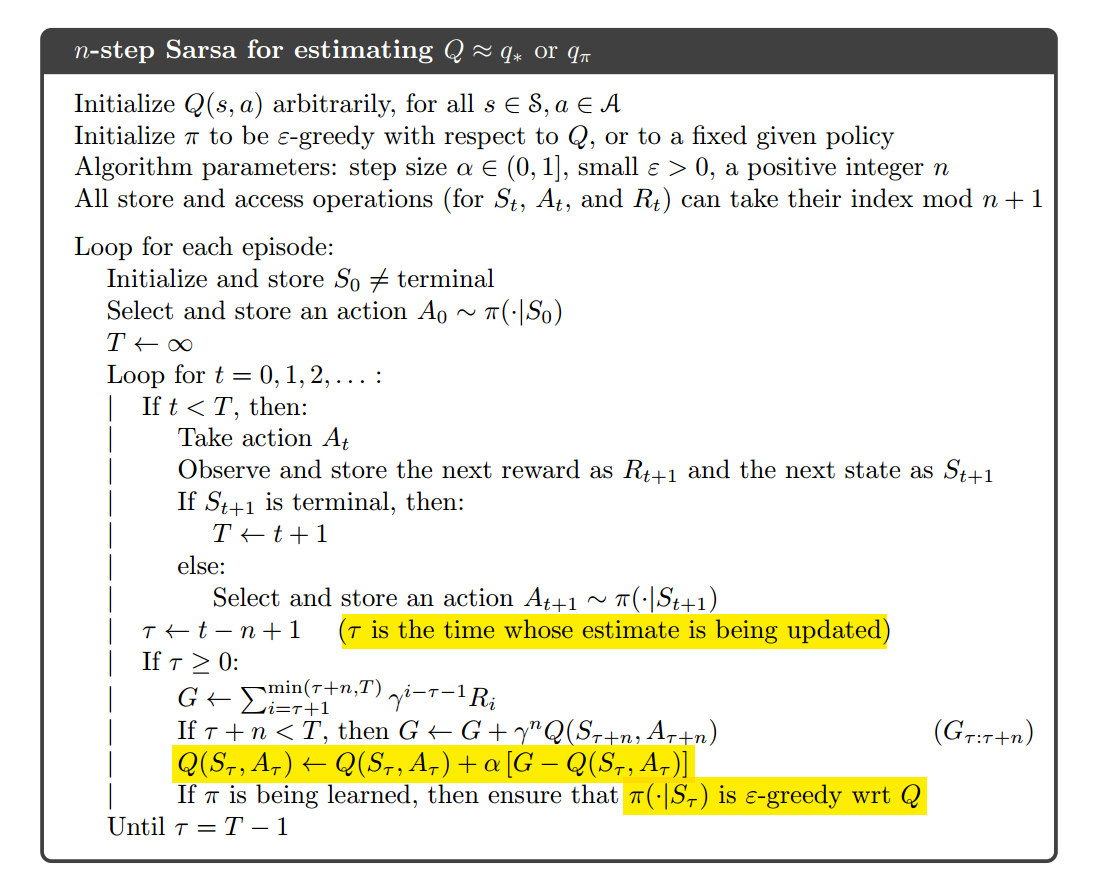
n-step Sarsa
- n-step Sarsa:
- 回报:$G_{t:t+n} = R_{t+1} + \gamma R_{t+2} + \gamma^{n-1} R_{t+n} + \gamma^nQ_{t+n-1}(S_{t+n}, A_{t+n})$
- 更新动作价值函数:$Q_{t+n}(S_t, A_t) = Q_{t+n-1}(S_t, A_t) + \alpha[G_{t:t+n} - Q_{t+n-1}(S_t,A_t)]$
- n-step Expected Sarsa:
- 回报:$G_{t:t+n} = R_{t+1} + \gamma R_{t+2} + \gamma^{n-1} R_{t+n} + \gamma^n \bar V_{t+n-1}(S_{t+n})$
- 更新价值函数:$\bar V_t(s) = \sum_a \pi(a|s)Q_t(s,a)$
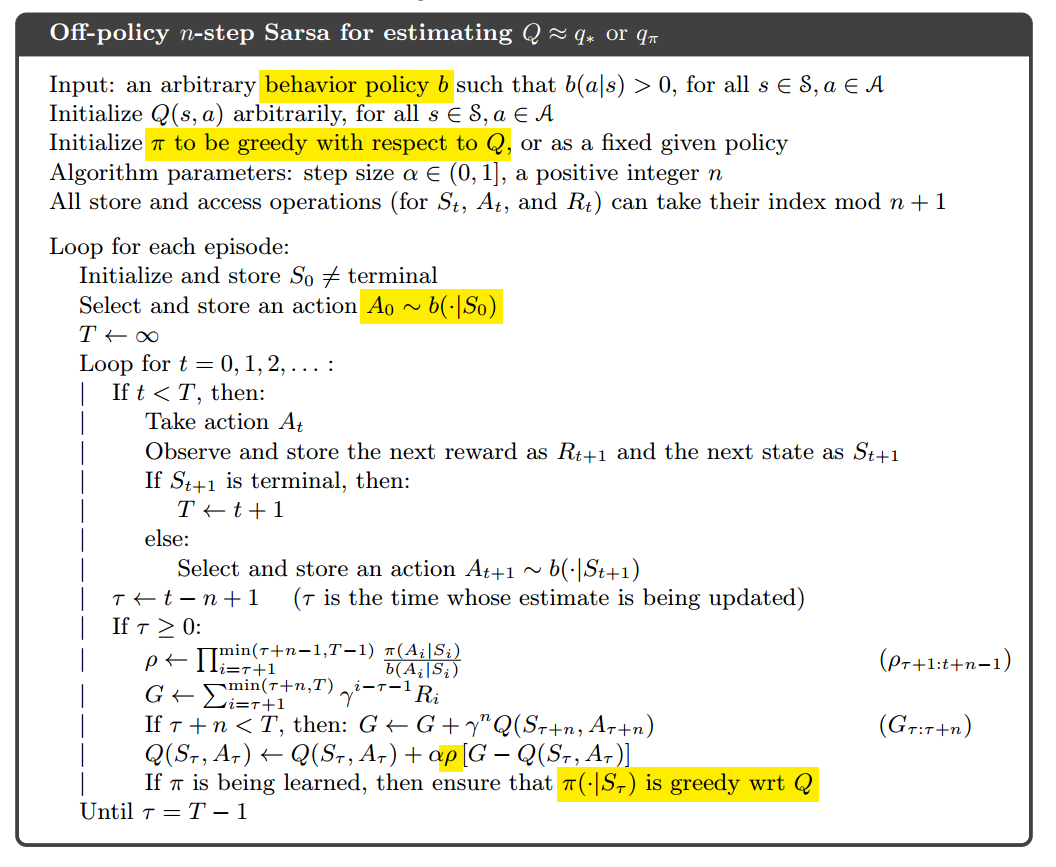
n-step off-policy with Importance Sampling
更新动作价值函数:
$$Q_{t+n}(S_t, A_t) = Q_{t+n-1}(S_t, A_t) + \alpha \rho_{t:t+n-1}[G_{t:t+n} - Q_{t+n-1}(S_t, A_t)]$$
其中,重要性采样比例:
$$\rho_{t:h} = \prod_{k=t}^{min(h,T-1)}\frac{\pi(A_k|S_k)}{b(A_k, S_k)}$$
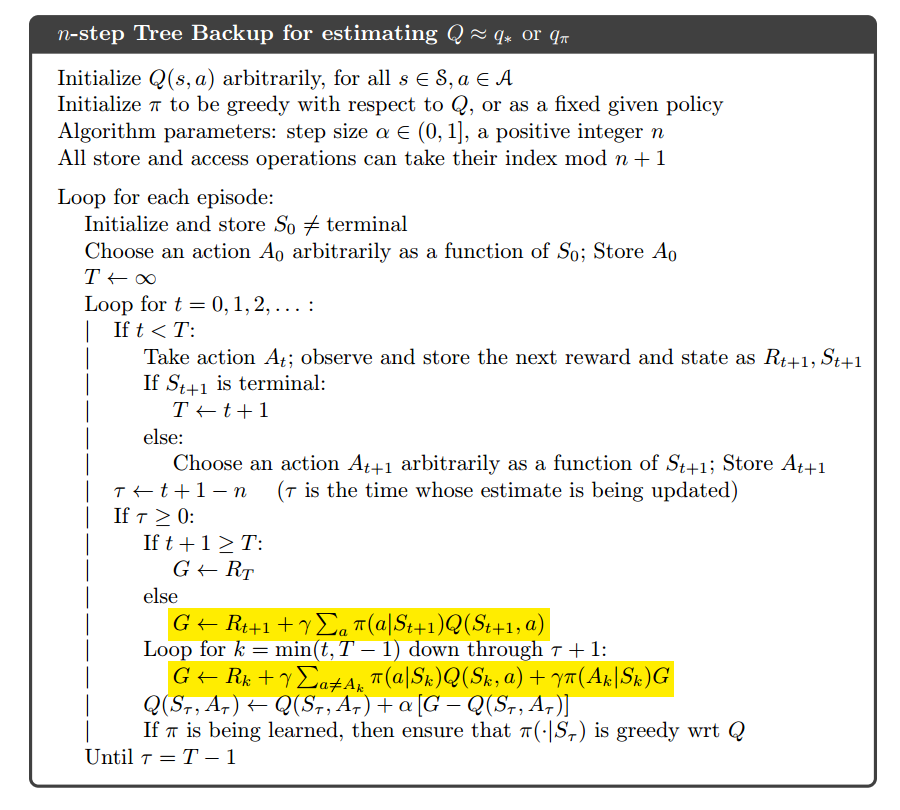
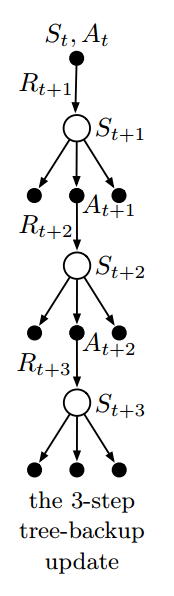
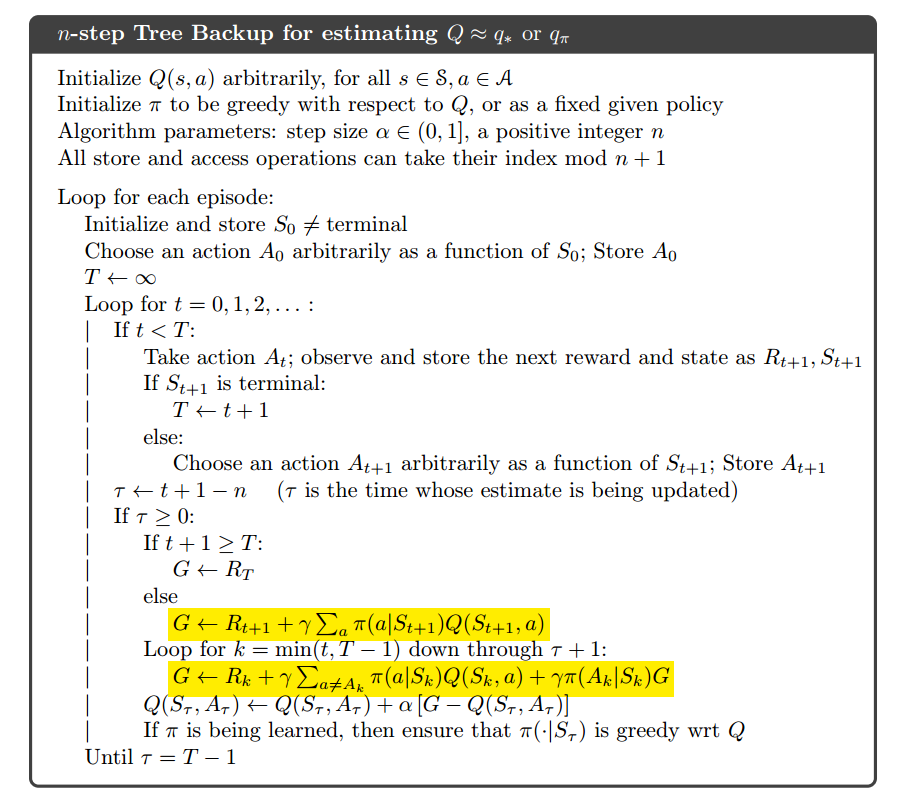
n-step Tree Backup Algorithm
不需要重要性采样。
使用所有叶子节点的动作价值函数去更新动作价值函数。
回报:
$$G_{t:t+n} = R_{t+1} + \gamma \sum_{a\neq A_{t+1}}\pi(a|S_{t+1})Q_{t+n-1}(S_{t+1}, a) + \gamma\pi(A_{t+1}|S_{t+1})G_{t+1:t+n}$$
n-step $Q(\sigma)$
$\sigma$代表是否使用全采样。
回报:
$$G_{t:h} = R_{t+1} + \gamma(\sigma_{t+1}\rho_{t+1}+(1-\sigma_{t+1})\pi(A_{t+1}|S_{t+1}))(G_{t+1:h}-Q_{h-1}(S_{t+1}, A_{t+1})) + \gamma \bar V_{h-1}(S_{t+1})$$