强化学习导论学习笔记——(二)
2. Multi-armed Bandits
k-armed Bandit Problem,K臂老虎机
问题描述:重复面临有k种选择的情况,每一次选择之后,都会收到一个reward。这个reward服从一个跟你的选择相关的分布。你的目标是,在选择t次后,找到最大的期望reward。
为什么叫K臂老虎机:有K个单臂老虎机,每个时间节点,你可以选择K个中任意一个老虎机选择按下它的臂,然后获得一个奖励。目标自然是多次选择之后的累计奖励最大。
形式化定义:假设时刻$t$的动作是$A_t$,reward是$R_t$,定义价值函数:$q_*(a) = E[R_t|A_t=a]$。
特点:每个时刻下,$q_*(a)$是固定的,stationary。
- 如果我们知道每个动作a对应的价值q,那么这个问题对我们来说就已经解决了,即,我们选择q最大的那个a。
- 然而,我们并不知道实际上的q是什么,只能估计$Q_t(a)\approx q_*(a)$。
- 在每个时间节点上,如果总是选择对应的估计Q最大的a,这被称为greedy。
- $\epsilon$-greedy::$1-\epsilon$的概率选择Q最大的a,$\epsilon$的概率选择其他a。
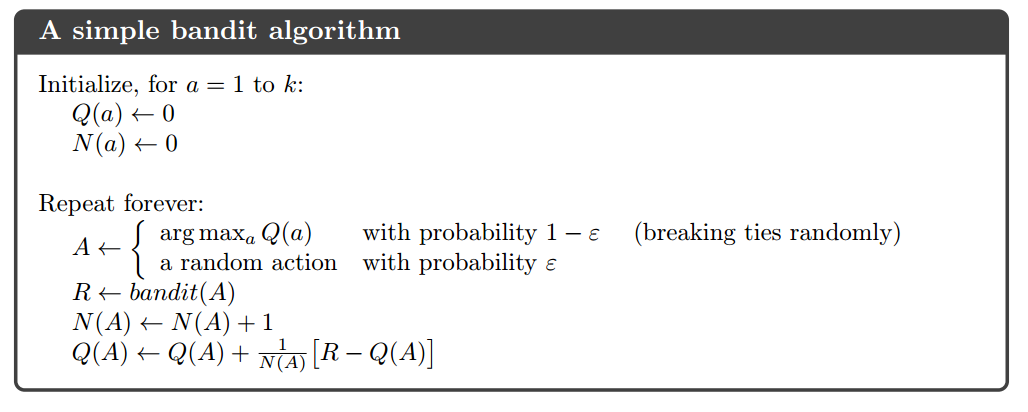
- 估计$Q_t(a) = \frac{在时刻t之前,所有采用动作a获得的奖励之和}{在时刻t之前,采用动作a的次数}= \frac{\sum^{t-1}{i=1}R_i\cdot\mathbf{1}{A_i=a}}{\sum^{t-1}{i=1}\mathbf{1}{A_i=a}}$,被称为
sample-average。
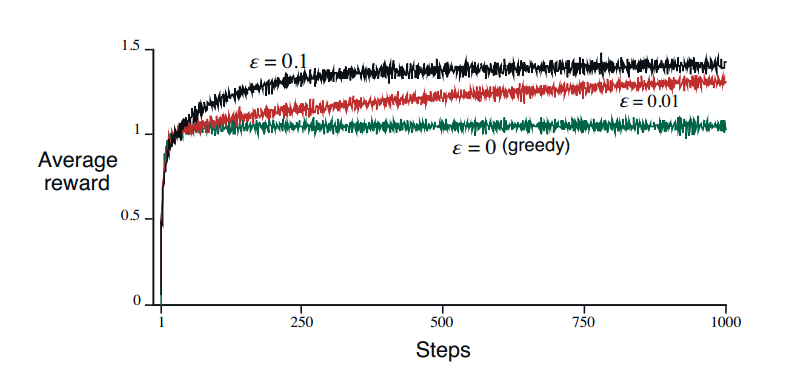
10-armed Testbed
- 设置一个10臂老虎机作模拟。
- 真实的价值函数$q_*(a)$服从标准高斯分布(均值是0,方差是1)。
- t时刻的奖励$R_t$服从高斯分布,均值是$q_*(A_t)$,方差是1。
- 可以规定每次实验做1000次选择,称为一个run。
- 一共跑了2000个独立的run。
- 实验结果($\epsilon$-greedy的优越性):
增量式的估计
- 上面的sample-average即:$Q_n = \frac{R_1+R_2+…+R_{n-1}}{n-1}$
- 改写成增量式的形式:$Q_{n+1} = Q_n + \frac{1}{n}[R_n-Q_n]$
- 即:新估计 = 老估计 + 步长 × [奖励 - 老估计]
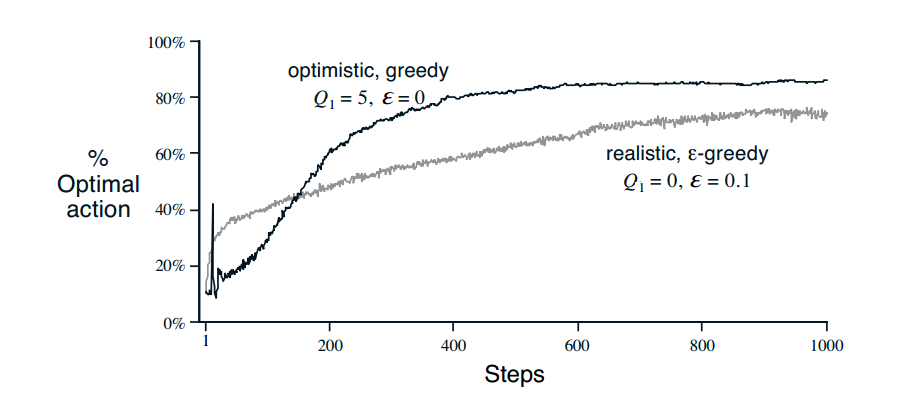
Optimistic Initial Values
- 设置初始的$Q_1(a)$为一些较大的值。
- 这样会鼓励explore。
- 对于nonstationary的问题不适用。
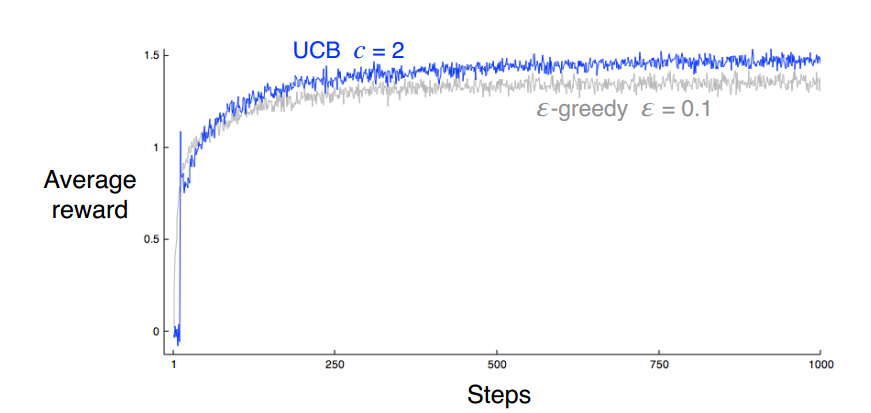
Upper-Confidence-Bound Action Selection(UCB)
- $A_t = \underset{a}{argmax}[Q_t(a)+c\sqrt{\frac{log;t}{N_t(a)}}]$
- 其中,$N_t(a)$代表动作a在t之前出现的次数,根号项衡量动作a的不确定性,如果某个动作已经使用了很多次,则倾向使用使用次数少的,这样达到explore的效果。
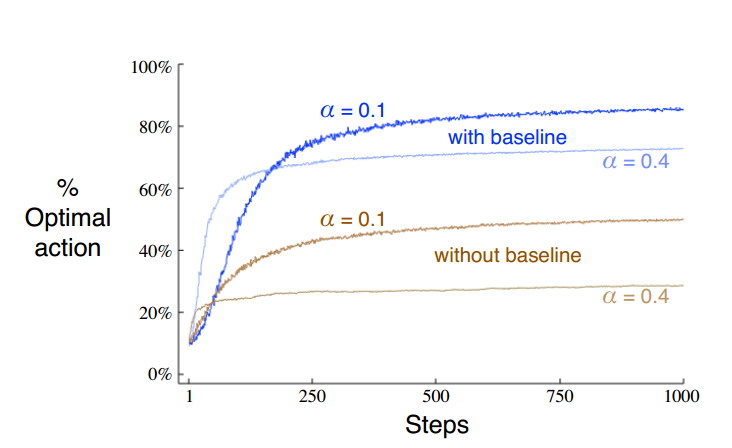
Gradient Bandit Algorithms
- 使用一个数值表示对某个动作的偏好:$H_t(a)$
- $Pr{A_t=a}=\frac{e^{H_t(a)}}{\sum_{b=1}^k{e^{H_t(b)}}}=\pi_t(a)$
- 更新规则:
- $H_{t+1}(A_t) = H_t(A_t) + \alpha(R_t-\overline R_t)(1-\pi _t(A_t))$
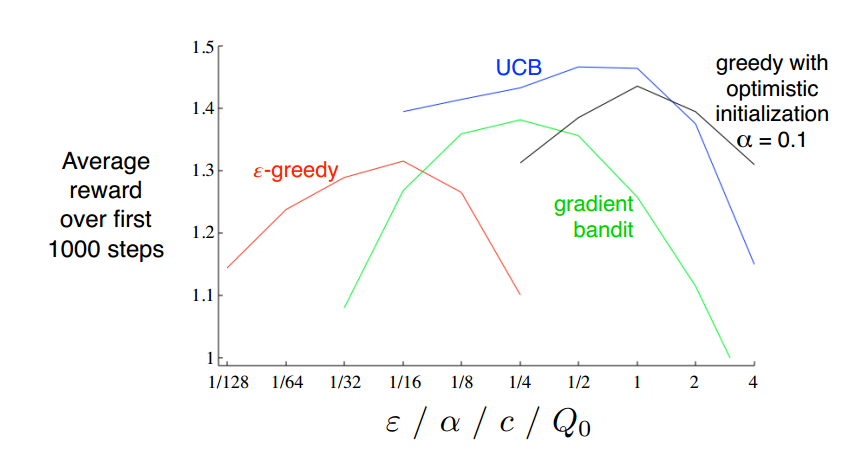
各种方法对比
代码分析
核心代码:
1 | # get an action for this bandit |