强化学习导论学习笔记——(三)
3. Finite Markov DecisionProcesses
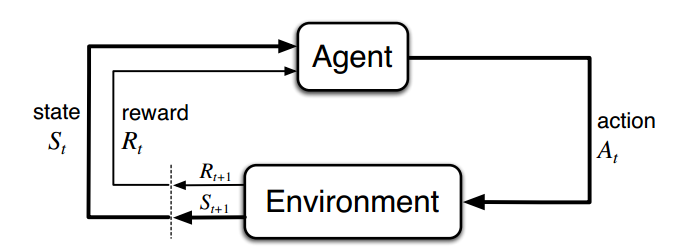
Agent和Environment的交互
- 学习者和决策者称为agent。
- agent交互的对象,外部环境,称为Environment。
- 在时刻t,agent的所处的环境用状态:$S_t \in S$表示,$S$是可能的状态集。假设agent采用了动作$A_t\in A(S_t)$,$A(S_t)$代表在状态$S_t$下可能的动作集。
- 到了下一个时刻t+1,agent收到了一个奖励:$R_{t+1} \in R$,并且发现自己处在一个新的state中:$S_{t+1}$。
什么是有限
有限MDP中的有限意味着:状态空间S、动作空间A和奖励空间R都是离散且有限的。
目标和奖励的区别
- 每个时间节点上,agent都会收到一个奖励的数值:$R_t$。
- 但是,agent的目标应该是:所有时间结点上的奖励的和的最大化。
- 即:$G_t = R_{t+1} + R_{t+2} + … + R_T$
什么是Episode
一系列的agent和environment交互序列。每个episode之间相互不影响,且都是有一个相同的终止状态(terminate state)。
Continuing Tasks
不同于Episode类的任务,这类任务没有终止状态,也就是说$T = \infty$。因此,如果考虑这类任务,那么$G_t$将是无穷大,于是引入discounting。
Episode和Continuing Tasks的统一规范
在Episode的尾部加入吸收状态(absorbing state),在此状态下,奖励永远是0,且下一个状态永远是当前状态。
这样收益可以统一使用下面的Expected Discounted Return表示。
Expected Discounted Return
- 回报:$G_t = R_{t+1} + \gamma R_{t+2} + … = \sum_{k=0}^{\infty} \gamma ^k R_{t+k+1}$
- $\gamma$是参数,且$0\leq \gamma \leq 1$,被称为discount rate。
- 含义:一个奖励,如果是在k个时间节点以后收到,那么对于当前来说,它的价值是即时奖励的$\gamma^{k-1}$倍。
- 从$G_t$的定义,很容易获得递推式:$G_t = R_{t+1} + \gamma G_{t+1}$
马尔科夫性质(Markov property)
- 核心思想:当前state继承了所有的环境历史信息。
- $Pr{S_{t+1}=s’, R_{t+1}=r|S_0,A_0,R_1,…,S_{t-1},A_{t_1},R_t,S_t,A_t} = Pr{S_{t+1}=s’, R_{t+1}=r|S_t,A_t}$
- 即便state是非马尔科夫的,我们也希望近似到马尔科夫。
Markov Dicision Processes(MDP)
- 满足马尔科夫性质的强化学习任务称为MDP。
- 如果state和action空间有限,则称为有限MDP(涵盖了现代强化学习90%的问题)。
- 用$p(s’,r|s,a)$表示$Pr{S_{t+1}={s}’, R_{t+1}=r|S_t,A_t}$,这个条件概率是描绘了整个MDP的动态(Dynamics)。
- state-action期望奖励:$r(s,a) = \mathbb{E}[R_{t+1}|S_t=s,A_t=a]=\sum_{r\in R}r\sum_{s’\in S}p(s’, r|s,a)$
- 状态转移概率:$p(s’|s,a) = Pr{S_{t+1}=s’|S_t=s, A_t=a}=\sum_{r\in R}p(s’, r| s, a)$
- state-action-nextstate期望奖励:$r(s, a, s’) = \mathbb{E}[R_{t+1}|S_t=s,A_t=a, S_{t+1}=s’] = \sum_{r\in R}r\frac{p(s’,r|s,a)}{p(s’|s,a)}$
价值函数
关于策略$\pi$的state-value函数:
$$v_{\pi}(s) = {\mathbb{E}}_{\pi}[G_t|S_t=s] = \mathbb{E}_{\pi}[\sum_k\gamma^kR_{t+k+1}|S_t=s]$$
即,在使用策略$\pi$的前提下,衡量处于某个state有多好。
关于策略$\pi$的action-value函数:
$$q_{\pi}(a,s) = \mathbb{E}_{\pi}[G_t|S_t=s,A_t=a] = \mathbb{E}_{\pi}[\sum_{k=0}^{\infty}\gamma^kR_{t+k+1}\bigm|S_t=s,A_t=a]$$
即,在使用策略$\pi$的前提下,衡量处于某个state下,执行某个action有多好。
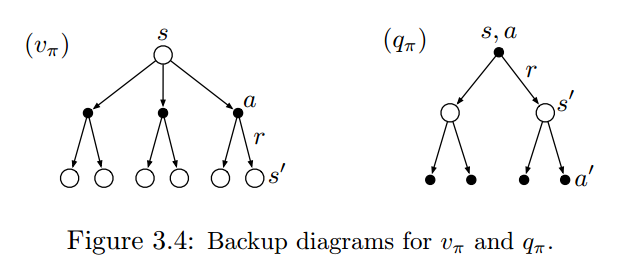
Bellman Euqation
Bellman Expectation Euqation for $v_{\pi}$:
$$v_{\pi}(s) = \sum_a\pi(a|s)\sum_{s’,r}p(s’,r|s,a)[r+\gamma v_{\pi}(s’)];;\forall s \in S$$
理解:
- 1.方括号中是根据后继状态的价值重新估计的价值函数,再在动作空间、后继状态空间和动作空间用相应的概率做加权求和。
- 2.表达的是某个状态的价值和其后继状态的价值之间的关系。
backup:是强化学习方法的核心,以时序意义上的回退,用下一个时刻的值去评估当前时刻的值。
Bellman Expectation Euqation for $q_{\pi}$
$$q_{\pi}(s,a) = \sum_{s’}p(s’,r|s,a)[r+\gamma \sum_{a’}q(s’,a’)]$$
推导:
$$v_\pi(s) = \mathbb{E}_{\pi}[G_t \mid S_t = s]$$
$$= \mathbb{E}_{\pi} [R_{t+1} + \gamma G_{t+1} \mid S_t = s]$$
$$= \sum_a \pi(a \mid s) \sum_{s’, r} p(s’, r \mid s, a) [r + \gamma v_\pi(s’)].$$
$$q_{\pi}(s,a) = \mathbb{E}_{\pi}[G_t \mid S_t = s, A_t = a]$$
$$= \mathbb{E}_\pi [R_{t+1} + \gamma G_{t+1} \mid S_t = s, A_t = a]$$
$$= \sum_{s’,r}p(s’,r|s,a)[r+\gamma \sum_{a’}q(s’,a’)]$$
参考资料:https://joshgreaves.com/reinforcement-learning/understanding-rl-the-bellman-equations/
最优化价值函数
$$v_*(s) = \underset{\pi}{max}v_{\pi}(s)$$
$$q_*(s,a) = \underset{\pi}{max}q_{\pi}(s,a)$$
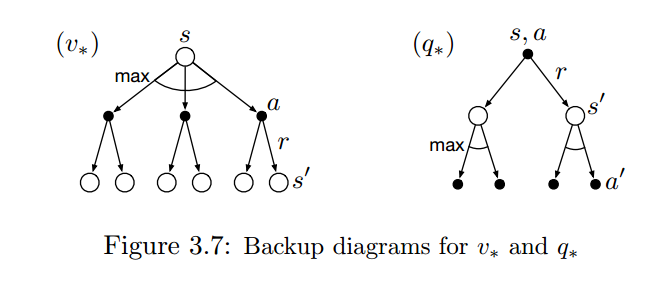
Bellman Optimality Euqation for $v_*(s)$:
$$\underset{a\in A(s)}{max}\sum_{s’,r}p(s’,r|s,a)[r+\gamma v_*(s’)]$$
Bellman Optimality Euqation for $q_*(s,a)$:
$$\sum_{s’,r}p(s’,r|s,a)[r+\gamma \underset{a’}{max}q_*(s’, a’)]$$
代码分析
问题描述:
- 动作空间:上下左右。
- 奖励:到A点会有10的奖励,且会被带到A’,到B有10的奖励,且会被带到B’。如果动作要把agent带离格子世界,则agent不懂,且奖励是-1。其他动作奖励是0。
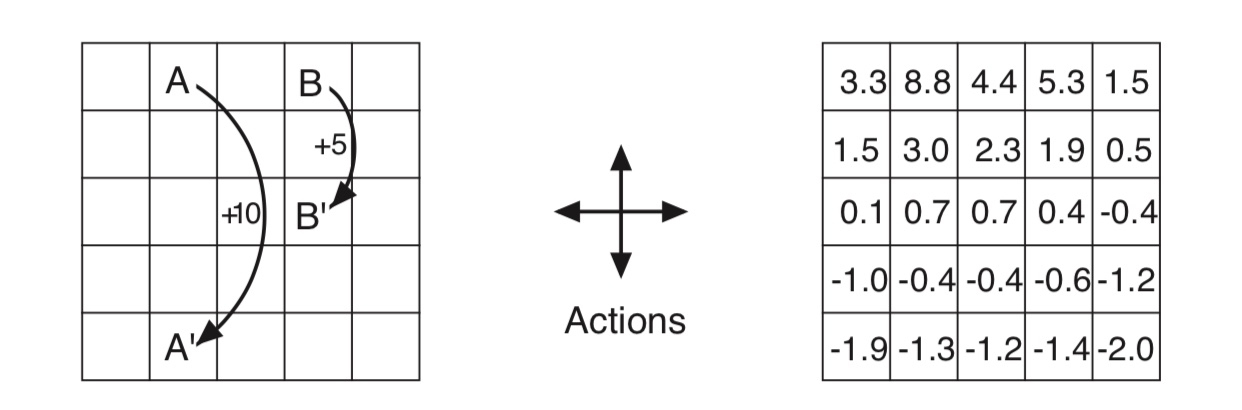
假设初始策略是等概率地选择上下左右这四个动作:
1 | # left, up, right, down |
下面代码描述了给定当前状态和动作,下一个状态和奖励是什么。
1 | def step(state, action): |
下面代码使用bellman equation做backup,去迭代价值函数:
1 | for i in range(0, WORLD_SIZE): |