强化学习导论学习笔记——(五)
5. Monte Carlo Methods
蒙特卡洛方法简介
使用蒙特卡洛方法不需要像DP一样,对环境要有完整的知识,而是通过经验去学习。所谓经验就是对状态、动作、奖励的采样(sample sequence)。
用sample的均值去近似期望。
使用蒙特卡洛通常需要完整的episode,因此蒙特卡洛的更新方式更像是episode-by-episode,而不是像DP的step-by-step。
优点:
- 1.可以从实际经验中学习;
- 2.可以从模拟的经验中学习;
- 3.可以直接从感兴趣的state开始采样episode。
蒙特卡洛预测(评估)
- 在一个episode中状态s可能出现多次,每一次出现称为一次对状态s的访问(visit)。
- first-visit MC method:只是用每个episode中第一次对状态s的访问评估状态s的价值函数。
- every-visit MC method:用每个episode中每次对状态s的访问评估状态s的价值函数。

$V(s)\leftarrow average(Return(s))$
核心代码:
1 | # Monte Carlo Sample with On-Policy |
蒙特卡洛评估动作价值函数(Action Values)
- 注意:如果我们的问题中,没有对环境建模,那么单纯评估状态价值函数是不够的。我们必须要评估动作价值函数。
- 主体思想:从评估state到评估state-action对。
- 可能存在的问题:某些state-action对可能不会被访问(稀疏性问题)。
蒙特卡洛控制
- 控制(control)的目的是找到最优策略。

- 其中,$E$代表策略的evaluation,$I$代表策略的improvement。
Monte Carlo Exploring Starts
- Exploring Starts:所有的state-action对都有可能被选为episode的开始(start)。

核心代码:
1 | # Monte Carlo with Exploring Starts |
不使用Exploring Starts
- 如何才能不使用Exploring Starts?保证所有被选择的动作被持续地选择。
- 使用on-policy和off-policy。
on-policy vs off-policy
- on-policy只有一套policy,更简单,是首选。
- off-policy使用两套policy,更复杂、更难收敛;但也更通用、更强大。
- on-policy和off-policy本质依然是Exploit vs Explore的权衡。
on-policy
- 去评估和提高生成episode时采用的policy。全过程只有一种策略,MC ES属于on-policy。
off-policy
- 所有的MC控制方法都面临一个困境:它们都想找到一个最优的策略,但却必须采用非最优的策略去尽可能多地探索(explore)数据。
- 直接使用两套策略:采样用的policy称为
behavior policy,即行为策略;最终的目标policy:target policy,即目标策略。这就是off-policy。 - 假设目标策略是$\pi$,行为策略是$b$,那么对于所有的$\pi(a|s)>0$必然有$b(a|s)>0$,这称为“覆盖”(coverage)。一个常见的例子是:行为策略使用价值函数的greedy policy,而目标策略使用ε-greedy policy。
重要性采样(importance sampling)
几乎所有的off-policy都使用重要性采样(importance sampling)。
为什么要使用重要性采样?我们希望在使用目标策略$\pi$的情况下用均值估计价值的期望,但我们获得的是在使用行为策略$b$的情况下的均值,也就是:$\mathbb{E}[G_t \mid S_t =s] = v_b(s)$。这二者是有差距的。因此我们希望使用重要性采样去纠正。
给定初始状态$S_t$,后续的状态-动作轨迹在使用目标策略$\pi$的情况下的概率为:
$Pr{At,S_{t+1}, A_{t+1}, … S_T \mid S_t, A_{t:T −1} \sim \pi}$ $=\prod_{k=t}^{T-1}\pi(A_k\mid S_k)p(S_{k+1}\mid S_k, A_k)$
引入重要性采样比例(the importance sampling ratio):
$\rho_{t:T −1}=\frac{\prod_{k=t}^{T-1}\pi(A_k\mid S_k)p(S_{k+1}\mid S_k, A_k)}{\prod_{k=t}^{T-1}b(A_k\mid S_k)p(S_{k+1}\mid S_k, A_k)}$ $=\prod_{k=t}^{T-1}\frac{\pi(A_k\mid S_k)}{b(A_k\mid S_k)}$
上面这个式子正好巧妙地把MDP中未知的状态转移概率约掉。
于是return的期望又可以得到校正:$\mathbb{E}[\rho_{t:T−1}G_t \mid S_t =s] = v_{\pi}(s)$
odinary importance sampling:
$$V(s) = \frac{\sum_{t\in J(s)} \rho_{t:T (t)-1}Gt}{\mid J(s)\mid} $$
weighted importance sampling:
$$V(s) = \frac{\sum_{t\in J(s)} \rho_{t:T (t)-1}Gt}{\sum_{t\in J(s)} \rho_{t:T (t)-1}} $$
odinary importance sampling vs. weighted importance sampling:
- odinary importance sampling:无偏差,但方差没有保证。
- weighted importance sampling:有偏差,方差有上限。
评估:
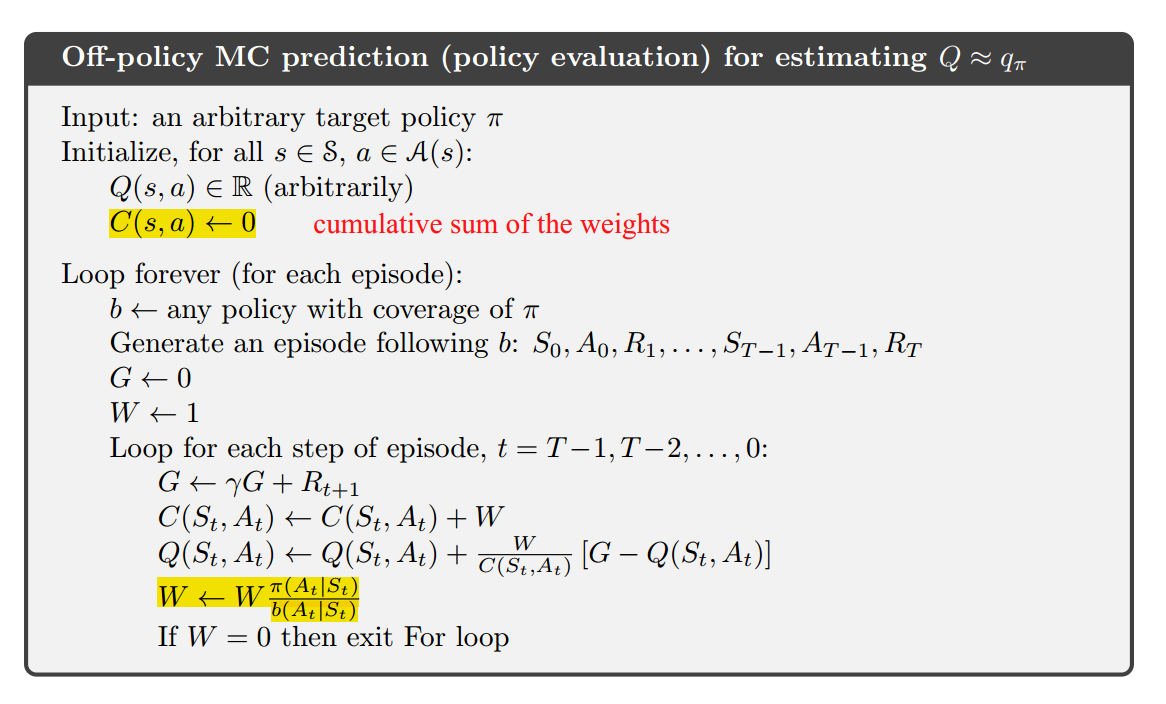
上面的评估使用了采样权重增量式的方法。
控制:
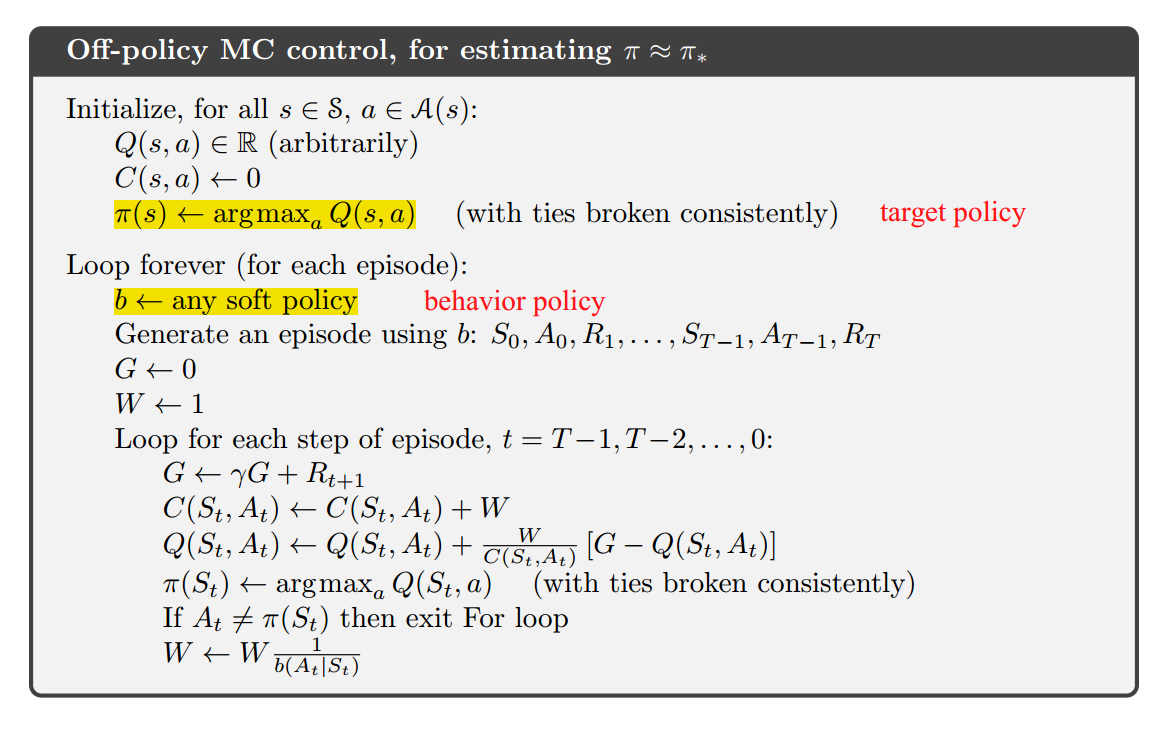
核心代码:
1 | # Monte Carlo Sample with Off-Policy |